
Accurate eyes for the robot – automation in the food industry
Food & Beverages | Robotics | Classification | MatchingAnlagenbau Habeck GmbH & Co. KG has developed a robot-based pick and place machine for the food industry based on machine vision. Thanks to the MERLIC machine vision software from MVTec Software GmbH, the robot reliably picks up unsorted objects of the most varied shapes from a conveyor belt.
Reliably gripping randomly placed products with machine vision
Anlagenbau Habeck GmbH & Co. KG has developed a pick and place robot application for a wide range of customers in the food industry, which can be used flexibly to process a wide variety of goods. In the food industry, products vary in shapes and sizes, for example potatoes. The task of the robot is to reliably grip non-aligned products from the food industry with the highest possible cycle performance and to place them precisely for the subsequent automated production process. Due to the variability of products, fixed and repeatable programming, such as repetitive traverse movements, are not suitable for these processes. With machine vision, however, pick-and-place machines can detect, localize and grip complexly structured or randomly placed objects. The easy-to-use machine vision software MERLIC from MVTec Software GmbH is used for this application.

Pick and place machine detects unsorted food products
In the food industry, products such as potatoes or chocolate bars usually lie unsorted on the conveyor belt when they are fed to the robot packing area. The number of objects ranges from zero to 20, although a higher quantity is also possible depending on the batch size. The food is conveyed into the work area of the pick and place robot at a constant speed. The camera and LED panel lighting are installed in a tower shielded from extraneous light. The robot activates the image feed synchronously with the belt feed. This ensures that the complete area of the running belt and each product is captured at least once by the MERLIC machine vision software. An incremental encoder installed on the belt conveyor enables the robot program to count the continuous belt position in millimeters.

Automated handling according to the first-in/first-out principle
In the pick and place application, the machine vision system communicates with the installed Deltarobot via User Datagram Protocol (UDP): It transmits the precise position data via a specially developed plug-in that maps the communication protocol with the robot. As soon as the objects enter the robot's working area, it starts handling them. The first-in/first-out principle applies: the pick and place machine picks up the product that is furthest ahead in the direction of belt movement and still within its sphere of influence first and deposits it at the correct place. In this automated process, the coordinate systems of the MERLIC machine vision software and the robot are matched to each other. Thus, the vision coordinates correspond exactly to the taught-in working area of the robot. In addition, the distance between the zero point from the machine vision system to the pick and place robot is measured once during the installation of the system.
Machine vision as an eye substitute for pick and place robots
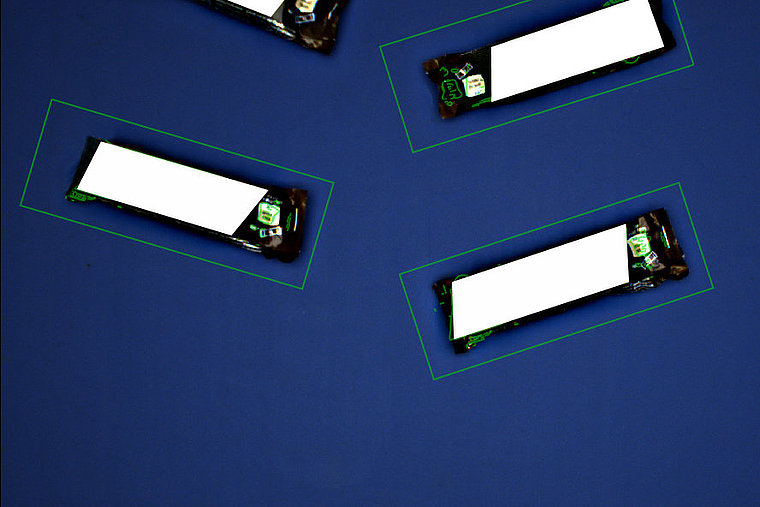
"A particular challenge in implementing the project was to seamlessly combine rigid structures such as industrial robots and statically programmed control systems with dynamic data sources such as machine vision solutions," explains Johannes Großehagenbrock. The project manager chose MVTec's easy-to-use machine vision software MERLIC, which serves as an eye substitute for the robot. The machine vision software provides the pick and place robot with the necessary precise information about the position and orientation of the food to be processed. The MERLIC tool "Localize with Matching" is used for this purpose. This matching technology finds objects precisely, robustly and quickly, even under difficult conditions. Using matching technology, the pick-and-place robot can react flexibly to changing variables in the environment, such as contours that are rotated, scaled, distorted in perspective, partially covered, or outside the image.
Automated processes in the food industry through machine vision
Since April 2022, the pick and place application from Anlagenbau Habeck has been fully developed. This significantly reduces the project planning effort when setting up a future customer plant including a machine vision system. “It is precisely the intuitive combination of all relevant components of machine vision at MERLIC, from image acquisition to visualization and communication, that offers the customer the greatest possible user-friendliness," summarizes Johannes Großehagenbrock.
The images of the products/brands are subject to the copyright of Anlagenbau Habeck GmbH & Co. KG. All rights reserved.