
Machine vision automates order picking in intralogistics
Packaging & Logistics | Robotics | 3D Vision | Object DetectionThe company Cretec Cybernetics implemented a robot-based depalletizing solution in order picking using the MVTec HALCON machine vision software. The application is able to recognize stacked boxes on pallets and depalletize them accordingly.
Order picking in intralogistics with robotics
Machine vision integrator Cretec Cybernetics has developed a robot-based depalletizing solution in order picking using machine vision for KH Lloreda, a Spanish market leader in kitchen cleaners and stain removers. In implementing the application, Cretec Cybernetics was able to build on existing technologies and infrastructure: The palletizing process was already automated using a laser-line profiler. However, this did not allow any further optimization of performance and productivity. Sustainable improvements and efficiency increases were only possible with machine vision. Therefore, KH Lloreda implemented the machine vision software MVTec HALCON in its production.
"Machine vision in combination with robotics is perfectly suited for the internal transport of goods," explains Irene Vázquez Martín, Junior Application Engineer at Cretec Cybernetics. Several challenges had to be overcome in implementing the new application in intralogistics: “One of them is the dynamically changing work environment of robots,” says Vázquez Martín. For example, not every pallet is loaded identically, and boxes can vary greatly in their positioning and size. In addition, poor lighting conditions in warehouses make it difficult to capture high-resolution images.

Robots take over palletizing and depalletizing in logistics
The application developed by Cretec Cybernetics in commissioning proceeds as follows: After receiving the order, the integration of the automated depalletizing process begins. At the center of the application is a robot with a sensor attached to its arm. The robot receives the request for a new order and moves to the provided product pallet. After stopping there, the sensor captures an image of the layout of the top layer of the current pallet. MVTec HALCON then processes the information about the number of boxes and the corresponding coordinates and sends them back to the robot. Afterwards, the robot depalletizes layer by layer until it has reached the number of boxes for the order. Finally, it palletizes the boxes on the empty pallet for the current order. This palletizing and depalletizing process is repeated automatically for each station with different products until the order is completed.
Machine vision software automates warehouse commissioning
In this robot-based automated commissioning application, the MVTec HALCON software is used. "We chose HALCON because it allows us to develop robust and reliable algorithms in a very short time," says Vázquez Martín. Programming powerful algorithms with HALCON supported the required functional enhancements of the 3D sensor used by the customer. The sensor is used in the dynamic environment without additional light sources.
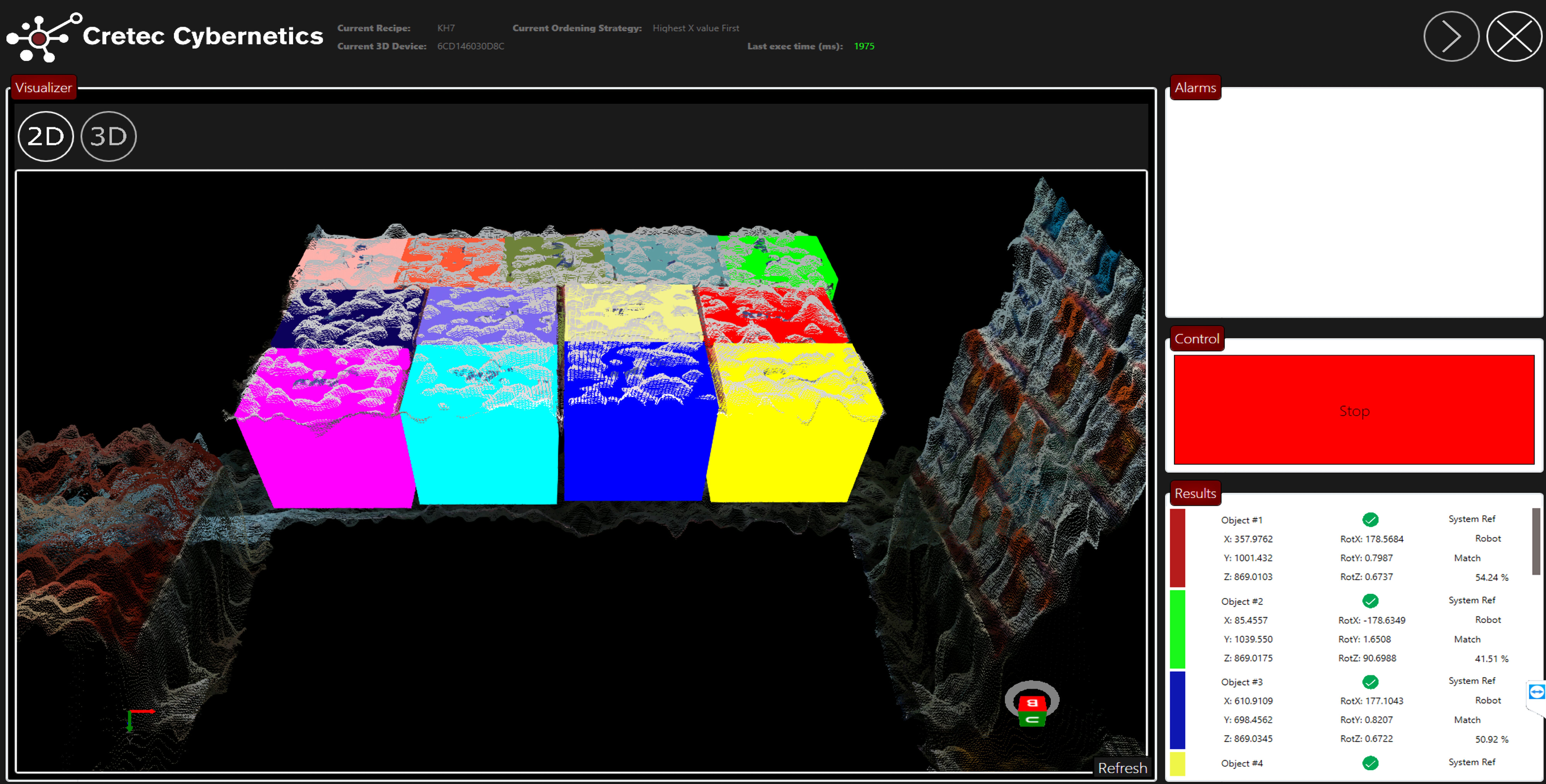
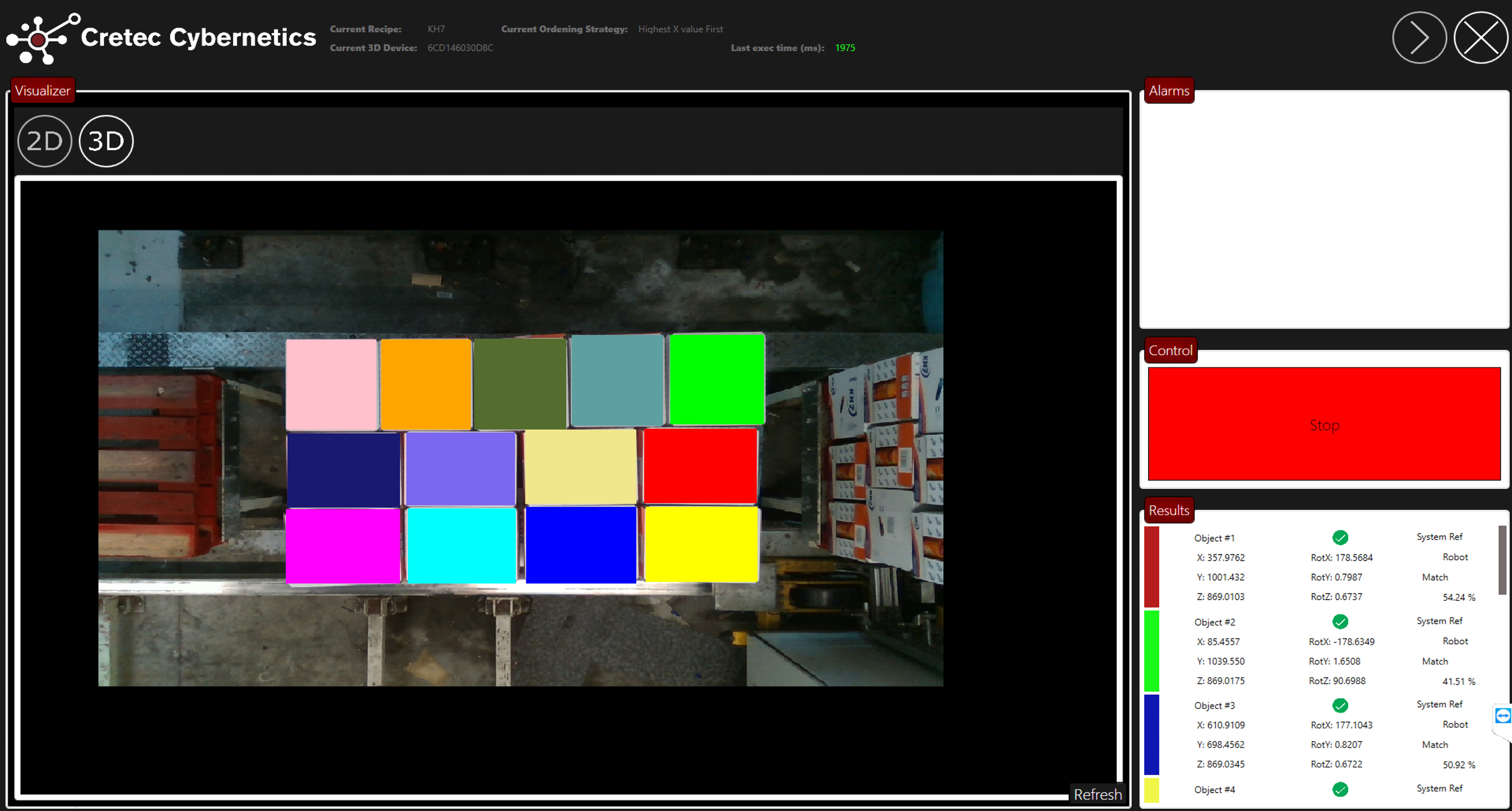
The image processing takes place on XYZ-images retrieved by the sensor on the robot arm. The HALCON library provides a large variety of state-of-the-art machine vision technologies. For the application developed by Cretec Cybernetics, the operator Maximally Stable Extremal Regions (MSER) and 3D Transformation as well as a customized calibration plate were used. The three technologies are used consecutively and according to the required activities. In the first step, the MSER algorithm is applied to the Z-image, meaning that the individual components are segmented from the entirety of the boxes. These components correspond to the individual boxes. Then, based on the information from the XYZ-images, the location and orientation of the boxes on the pallet are calculated via a rigid 3D transformation in the camera coordinate system. By means of hand-eye calibration, it is thus possible to convert this transformation into the robot coordinate system. Now the palletizer robot "knows" where and in which size the individual cartons are stacked on the pallet.
Success of automatic commissioning quickly apparent
KH Lloreda has been successfully using the application developed by Cretec Cybernetics in its intralogistics since July 2021. The automatic commissioning increased productivity by about 50 percent. "We were able to significantly reduce cycle time and dynamics. The system is now able to instantly capture multiple images of the same layer and provide stronger and more reliable results compared to the old laser profiling technology," reports Vázquez Martín of Cretec Cybernetics. "The combination of robotics and machine vision still offers an incredible amount of potential. Therefore, we will continue to pursue the goal of providing customers with better, faster and more reliable solutions."
The images of the products/brands are subject to the copyright of Cretec Cybernetics. All rights reserved.