
Industrielle Bildverarbeitung automatisiert Kommissionierung in der Intralogistik
Verpackung & Logistik | Robotik | 3D-Vision | ObjektdetektionDie Firma Cretec Cybernetics realisierte mithilfe der Bildverarbeitungssoftware MVTec HALCON eine roboterbasierte Depalettierungslösung in der Kommissionierung für KH Lloreda. Die Applikation erkennt gestapelte Kartons auf Paletten und depalettiert sie entsprechend.
Roboter kommissionieren Waren in der Intralogistik
Der Machine Vision Integrator Cretec Cybernetics hat für KH Lloreda, einem spanischen Marktführer für Küchenreiniger und Fleckenentferner, eine roboterbasierte Depalettierlösung in der Kommissionierung mit Unterstützung von Machine Vision entwickelt. Bei der Umsetzung der Applikation konnte Cretec Cybernetics auf bestehende Technologien und Infrastrukturen aufbauen: Der Palettierprozess war bereits mit einem Laserlinien-Profiler automatisiert. Damit konnte die Leistung und Produktivität jedoch nicht weiter optimiert werden. Nachhaltige Verbesserungen und Effizienzsteigerungen waren nur mit Machine Vision möglich. Daher implementierte KH Lloreda die Bildverarbeitungssoftware MVTec HALCON in seiner Produktion.
„Bildverarbeitung in Kombination mit Robotik eignet sich optimal für den internen Warentransport“, sagt Irene Vázquez Martín, Junior Application Engineer bei Cretec Cybernetics. Bei der Umsetzung der neuen Applikation mussten einige Herausforderungen gemeistert werden: „Eine davon ist die sich dynamisch ändernde Arbeitsumfeld der Roboter“, so Vázquez Martín. So ist nicht jede Palette identisch beladen und Kartons können in ihrer Positionierung und Größe stark variieren. Auch schlechte Lichtverhältnisse in den Lagerhallen erschweren die Aufnahme hochauflösender Bilder.

Roboter übernehmen das Palettieren und Depalettieren in der Logistik
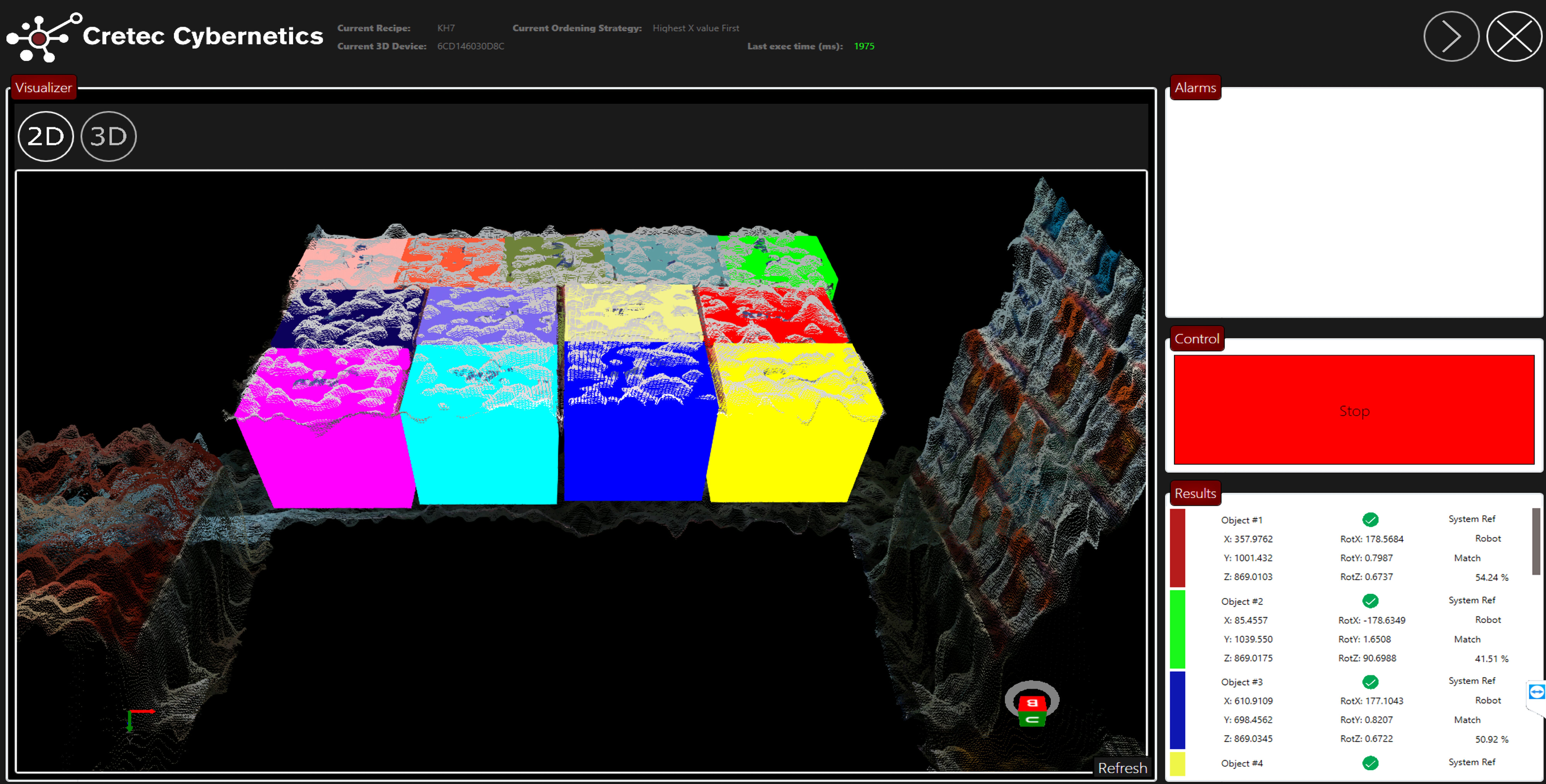
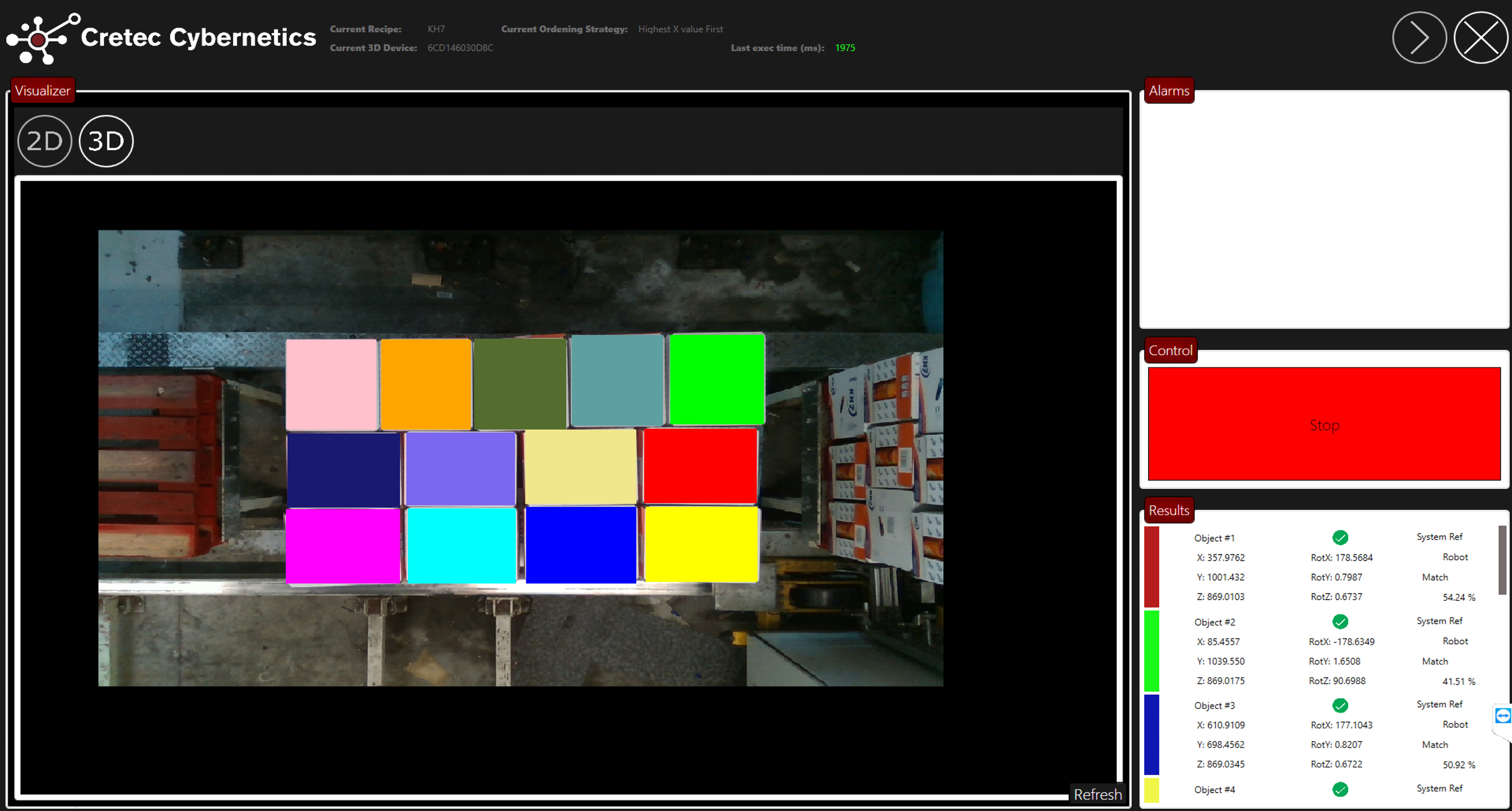
Die von Cretec Cybernetics entwickelte Applikation in der Kommissionierung arbeitet wie folgt: Nach Eingang der Bestellung beginnt die Integration des automatisierten Depalettierprozesses. Im Zentrum der Anwendung steht ein Roboter, an dessen Arm ein Sensor platziert ist. Der Roboter empfängt die Anfrage für einen neuen Auftrag und verfährt zu der bereitgestellten Produktpalette. Dort nimmt der am Arm des Roboters angebrachte Sensor ein Bild des Layouts der obersten Lage der aktuellen Palette auf. Anschließend verarbeitet MVTec HALCON die Informationen über die Anzahl der Kartons sowie die entsprechenden Koordinaten und sendet sie zurück an den Roboter. Dieser depalettiert daraufhin Schicht für Schicht, bis er die für den Auftrag erforderliche Anzahl von Kartons erreicht hat. Schließlich positioniert er die Kartons auf der leeren Palette für den aktuellen Auftrag. Dieser Vorgang wird für jede Station mit den verschiedenen Produkten wiederholt, bis der Auftrag vollständig und vollautomatisiert abgeschlossen ist.
Bildverarbeitungssoftware automatisiert Palettierung in der Logistik
In der roboterbasierten Kommissionierung kommt die Software MVTec HALCON zum Einsatz. „Wir haben uns für HALCON entschieden, weil wir damit robuste und zuverlässige Algorithmen in sehr kurzer Zeit entwickeln können“, sagt Vázquez Martín. Die Programmierung leistungsstarker Algorithmen mit HALCON unterstützte die erforderlichen Funktionserweiterungen des verwendeten 3D-Sensors. Dieser wird in der dynamischen Umgebung ohne zusätzliche Lichtquellen eingesetzt.
Die Bildverarbeitung findet auf XYZ-Bildern statt, die vom Sensor aufgenommen werden. Die HALCON-Bibliothek bietet über eine Vielzahl leistungsstarker Bildverarbeitungstechnologien. Für die von Cretec Cybernetics entwickelte Applikation kamen die Methoden Maximally Stable Extremal Regions (MSER) und 3D Transformation sowie eine kundenspezifische Kalibrierungsplatte zum Einsatz. Die drei Technologien kommen hintereinander und entsprechend den geforderten Tätigkeiten zum Einsatz. Im ersten Schritt wird der MSER-Algorithmus auf dem Z-Bild angewandt, das bedeutet, dass aus der Gesamtheit der Kartons einzelne Komponenten segmentiert werden. Diese Komponenten entsprechen den einzelnen Kartons. Anschließend werden, basierend auf den Informationen aus den XYZ-Bildern, die Lage und Orientierung der Kartons auf der Palette mit Hilfe einer rigiden 3D-Transformation im Kamerakoordinatensystem berechnet. Mittels Hand-Auge-Kalibrierung ist es damit möglich, diese Transformation in das Roboterkoordinatensystem umzurechnen. Nun „weiß“ der Roboter, wo und in welcher Größe die einzelnen Kartons auf der Palette gestapelt sind.
Erfolg der automatischen Kommissionierung schnell erkennbar
Mittlerweile setzt KH Lloreda die von Cretec Cybernetics entwickelte Applikation seit Juli 2021 erfolgreich in der Intralogistik ein. Die automatische Kommissionierung steigerte die Produktivität um etwa 50 Prozent. „Wir konnten die Zykluszeit und die Dynamik deutlich reduzieren. Das System kann mehrere Bilder derselben Schicht augenblicklich erfassen und liefert bessere sowie zuverlässigere Ergebnisse als die alte Laserprofilierungstechnologie“, berichtet Vázquez Martín von Cretec Cybernetics. „Die Kombination von Robotik und Machine Vision bietet noch unglaublich viel Potenzial. Damit werden wir auch in Zukunft unseren Kunden bessere, schnellere und zuverlässige Lösungen liefern.“