Alignment & Matching
Korrelationsbasiertes Matching
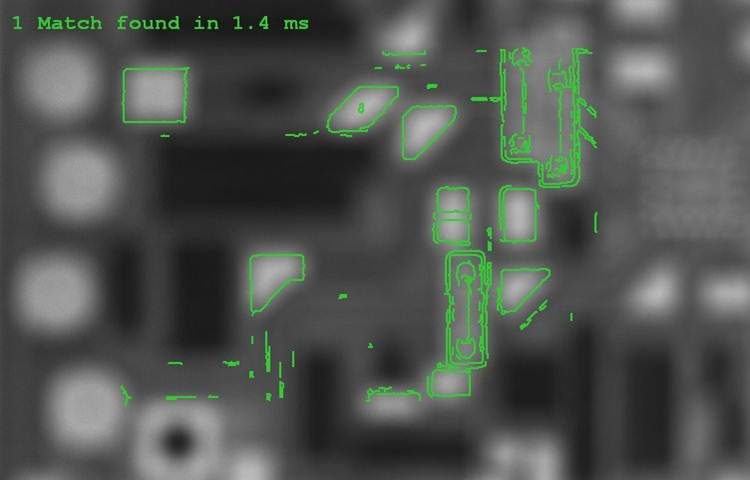
Das korrelationsbasiertes Matching der MVTec-Software ist eine Methode, die besonders robust gegenüber Unschärfe, Kantendeformation, Rotation und Textur reagiert.

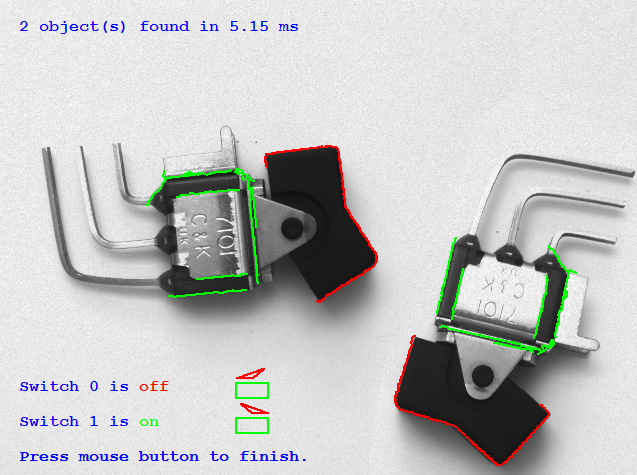
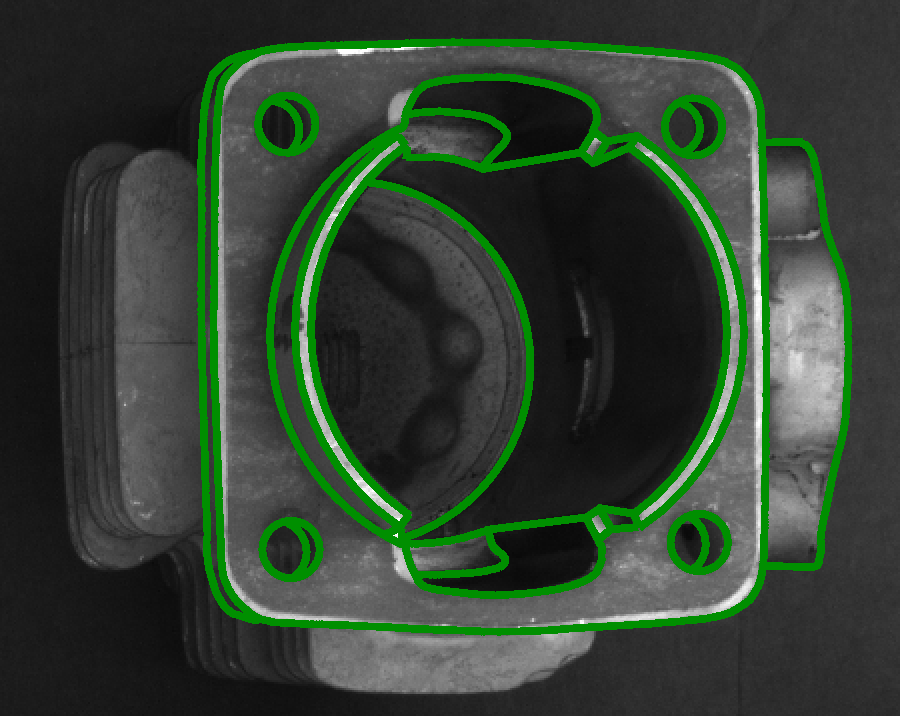
Formbasiertes Matching
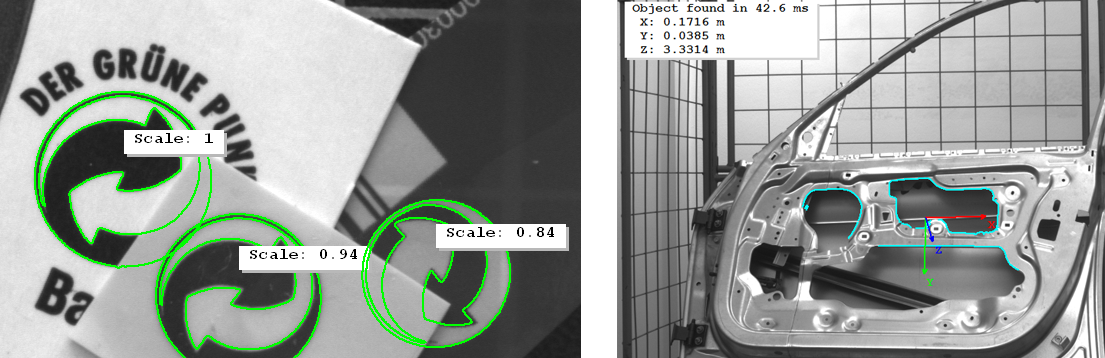
Die subpixelgenaue formbasierte Matching-Technologie findet Objekte präzise und robust in Echtzeit. Dies funktioniert sogar wenn sie rotiert, skaliert, perspektivisch verzerrt, lokal deformiert, teilweise überdeckt bzw. außerhalb des Bildes sind oder nicht-linearen Beleuchtungsschwankungen unterliegen. Das formbasierte Matching verarbeitet Bilder mit 8- oder 16-Bit sowie Farb- und Mehrkanalbilder. Objekte können anhand von Bildvorlagen oder CAD-Daten trainiert werden. Darüber hinaus lokalisiert das einzigartige komponentenbasierte Matching Objekte, die aus mehreren gegeneinander beweglichen Teilen bestehen. In den folgenden drei Tutorial-Videos erfahren Sie, wie Sie mit unserer Software verschiedene Anwendungen für formbasiertes Matching erstellen können:
Deskriptorbasiertes Matching
Planare Objekte mit Textur können mit dem deskriptorbasierten Matching der MVTec-Software extrem schnell in beliebiger Rotation und Kippung lokalisiert werden.

Formbasiertes 3D-Matching
Formbasiertes 3D-Matching ermöglicht die Erkennung und 3D-Lagebestimmung von beliebig angeordneten 3D-Objekten mit einer einzigen Kamera. Es erkennt die Position und Orientierung von 3D-Objekten basierend auf ihrem CAD-Modell, ihren Randkonturen oder bekannten Formmerkmalen, wie Kreisen oder Quadraten.
Erfahren Sie hier mehr über unsere anspruchsvolle formbasierte 3D-Matching-Technologie.

Oberflächenbasiertes 3D-Matching
Alternativ zum formbasierten 3D-Matching kann das oberflächenbasierte 3D-Matching der Software von MVTec eingesetzt werden. Dieses Verfahren ist für das Auffinden von Objekten mit beliebig ausgestalteten und deformierten Oberflächen optimiert.
Hier finden Sie weitere Informationen zu unserer oberflächenbasierten 3D-Matching-Technologie.