画像取得用のトリガーの構成
特定のカメラデバイスの構成オプションを有効にするには、画像ソースが保存されている構成を有効にします。こうすると、特定の画像ソースのカメラパラメーターを設定したり、その画像ファイルのプレビューモードを使用したりできるようになります。構成を有効にし、構成するカメラデバイスを選択すると、選択したカメラデバイスのパラメーター、たとえばトリガーモードを調整できます。MERLIC は、トリガーに応じて、画像収集用のトリガーモードを最大 3 つサポートします。「自走」、ソフトウェアおよびハードウェアです。
デフォルトでは、接続されているすべてのカメラデバイスのソフトウェアトリガーが MERLIC によって設定されます。異なるトリガーモードを使用するには、個々の カメラパラメーターを手動で変更します。そのためには、MVTec EasyParams を使用するか、「すべてのパラメーター」タブのカメラパラメーターを使用します。EasyParams には、検索しなくても最も重要な設定項目が表示されます。ただし、「すべてのパラメーター」タブのカメラパラメーターによっては、カメラデバイスでどのパラメーターがサポートされているかに応じて、いくつかの追加設定が可能です。トリガーモードをカメラデバイスに設定できない場合、カメラのそれぞれのデフォルト値が適用されます。
トリガーモードのパラメーター
カメラデバイスのトリガーモードを設定するには複数の方法があり、「EasyParams」タブ、または「すべてのパラメーター」タブを使用します。
トリガーモードの EasyParams
「EasyParams」タブでは、「Trigger Method」パラメーターでトリガーモードを設定できます。パラメーター「Trigger Selector」、「Trigger Mode」、「Trigger Source」が組み合わされます。
ハードウェアトリガーまたはソフトウェアトリガーのトリガーモードは、選択すると自動的に有効になります。ただし、トリガー手法「Off」を選択した場合、トリガーモードはオフのままです。
「FrameStart」以外 (または「FrameStart」が使用できない場合は「ExposureStart」) 以外のトリガーセレクターを使用したい場合は、「すべてのパラメーター」タブでトリガーセレクターとトリガーモードのどちらも設定する必要があります。
「すべてのパラメーター」内のトリガーモードのパラメーター
「すべてのパラメーター」タブでは、トリガーモードの構成のパラメーターをカテゴリ「AcquisitionControl」で指定します。
- パラメーター 「Trigger Selector」 を目的に応じて設定します。
- タブタイトルの
 ボタンでカメラパラメーターを更新します。
ボタンでカメラパラメーターを更新します。 - パラメーター「Trigger Mode」と「Trigger Source」でトリガーモードを設定します。
パラメーター「Trigger Mode」、「Trigger Source」、場合によっては「Trigger Software」は、パラメーター「Trigger Selector」で選択した値によって固定されるため、最初にトリガーセレクターを設定することが重要です。トリガーセレクターを変更すると、このパラメーターの組み合わせの構成全体が変更されるため、それも再設定する必要があります。
ハードウェアトリガー
ハードウェアトリガーモードを使用するときには、トリガー信号によって画像取得をトリガーする必要があります。トリガー信号は、たとえばボタンや光電センサーなどのトリガーデバイスから送信できます。
ハードウェアトリガーモードの「画像ソース」タブでライブ画像表示を使用するには、ハードウェアで画像取得がトリガーされていることを確認してください。
ハードウェアトリガーのためのカメラパラメーターの設定
「EasyParams」タブ
EasyParam の「Trigger Method」を、目的のハードウェアトリガー (たとえば「Line1」) に設定します。

選択できるハードウェアトリガーは「Line<x>」のタイプだけです。種類の違うハードウェアトリガーを使用する場合は、「すべてのパラメーター」タブでハードウェアトリガーを設定する必要があります。
「すべてのパラメーター」タブ
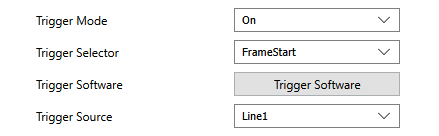
- パラメーター「Trigger Selector」でトリガータイプを選択します。
- 「Trigger Mode」を「On」に設定します。
- パラメーター「Trigger Source」を、ハードウェアトリガーに構成済みのピン、つまり物理的入力ラインに設定します。使用できるコネクターとそのセットアップによっては、「Trigger Source」の正しい値が、カメラデバイスとトリガーデバイスごとに異なる場合があります。正しいコネクターの詳細については、各カメラとトリガーデバイスのマニュアルを参照してください。
以下の図は、ハードウェアトリガーの構成例です。この例で、「Trigger Source」は「Line1」に設定されています。すなわち、このトリガータイプはハードウェアトリガーのために構成されます。したがって、トリガーデバイスは、「Line1」のそれぞれのピンに接続する必要があります。
ハードウェアトリガー信号のタイムアウト
MVApp の実行時には、タイムアウトにな前にハードウェアトリガー信号を送信する必要があります。そうしないと、画像取得がタイムアウトになります。タイムアウト時間のデフォルト値は 5 秒です。この値は、カテゴリ「HALCON Interface」のパラメーター「Grab Timeout」を設定して調整できます。
トリガーの脱落の処理
一部のカメラデバイスは「FrameTriggerMissed」イベントをサポートしています。このイベントは、たとえば前のトリガー信号による画像をまだ露光しているなどの理由により、処理できないトリガー信号をカメラデバイスが受信したことを示します。カメラデバイスが「FrameTriggerMissed」を送信した場合、Image Source Manager (ISM) はログに警告を記録します。MERLIC RTE モードでこのイベントが発生し、そのときシステムが「Ready」状態またはいずれかの実行状態だった場合、「Error」イベントが発生します。
破棄された画像の処理
場合によっては、カメラが取得した画像が失われることがあります。これはたとえば、処理が追いつかない速度で画像を取得したことによって画像バッファの容量を超過したときに発生します。この場合、画像は失われ、処理できません。
ハードウェアトリガーのカメラを使用するときに、このようなフレーム破棄が発生した場合、MERLIC Creator の 画像ソース ツールはエラー画像を生成し、ツールの状態を警告とします。該当するフレーム ID のギャップは埋められ、外部のトリガー信号と処理結果との対応関係は維持されます。MERLIC RTE モードでは、破棄された画像の処理手順はスキップされますが、対応する結果は、処理結果「Failed」で生成され、「Error」イベントが発生します。
ソフトウェアトリガー
ソフトウェアトリガーモードを使用する場合、トリガー信号は、MERLIC Creator、MERLIC Frontend、MERLIC RTE、または通信プラグインによって開始されます。
ソフトウェアトリガーモードで「画像ソース」タブのライブ画像表示を使用するには、カメラパラメーターを次のように設定する必要があります。
ソフトウェアトリガーのカメラパラメーターの設定
「EasyParams」タブ
EasyParam の「Trigger Method」を「Software」に設定します。

「すべてのパラメーター」タブ
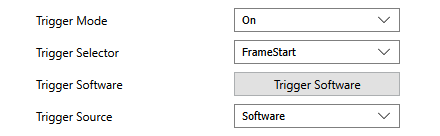
- パラメーター「Trigger Selector」でトリガータイプを選択します。
- 「Trigger Mode」を「On」に設定します。
- パラメーター 「Trigger Source」 を「Software」に設定します。
破棄された画像の処理
場合によっては、カメラが取得した画像が失われることがあります。これはたとえば、処理が追いつかない速度で画像を取得したことによって画像バッファの容量を超過したときに発生します。この場合、画像は失われ、処理できません。
ソフトウェアトリガーのカメラを使用するときには、取得するそれぞれの画像の前に、必ず 1 つのトリガーがあります。画像の破棄は、ソフトウェアトリガーの重大な構成ミスを示しており、したがってエラーとして扱われます。MERLIC RTE モードでは、現在のジョブが停止され、MERLIC は「Error」状態に変化します。この状態で、画像ソース構成を見直して、設定を調整できます。
自走モード
自走モードでは、画像は可能な限り速く取得されます。カメラはトリガー信号を待機しません。
自走モードのカメラパラメーターの設定
「EasyParams」タブ
EasyParam の「Trigger Method」を「Off」に設定します。

「すべてのパラメーター」タブ
パラメーター 「Trigger Mode」 を「Off」に設定します。

破棄された画像の処理
場合によっては、カメラが取得した画像が失われることがあります。これはたとえば、処理が追いつかない速度で画像を取得したことによって画像バッファの容量を超過したときに発生します。この場合、画像は失われ、処理できません。
カメラを自走モードで使用するときには、カメラは画像を可能な限り速く取得するため、画像の破棄は珍しいことではありません。画像処理が追いつかない場合に、画像が破棄されます。したがって、それによって生じるフレーム ID のギャップは無視され、次に得られる画像が処理されます。

