标定相机
使用此工具确定标定数据,即用于采集图像数据的设备可能出现的镜头失真和相对于图像平面的位置。所确定的标定数据可与工具校正图像配合使用以便校正图像。也可以直接在测量或定位类别的工具中使用它。如需了解如何为 MERLIC 设置相机,请参阅主题 采集。
此工具在训练模式下使用。 这就是说先使用指定的训练参数来执行训练。在这种情况下,训练包含确定标定数据。
工具结构
工具面板 分为 左侧的训练区域和右侧的图形窗口。 通过训练区域,您可以在选择标定板图像的处理模式和训练标定数据的训练模式之间切换。图形窗口显示当前处于活动状态模式的图像,该图像以蓝色高亮显示。除左上方的参数外,该工具还在工具右上方提供参数 标定板描述文件。
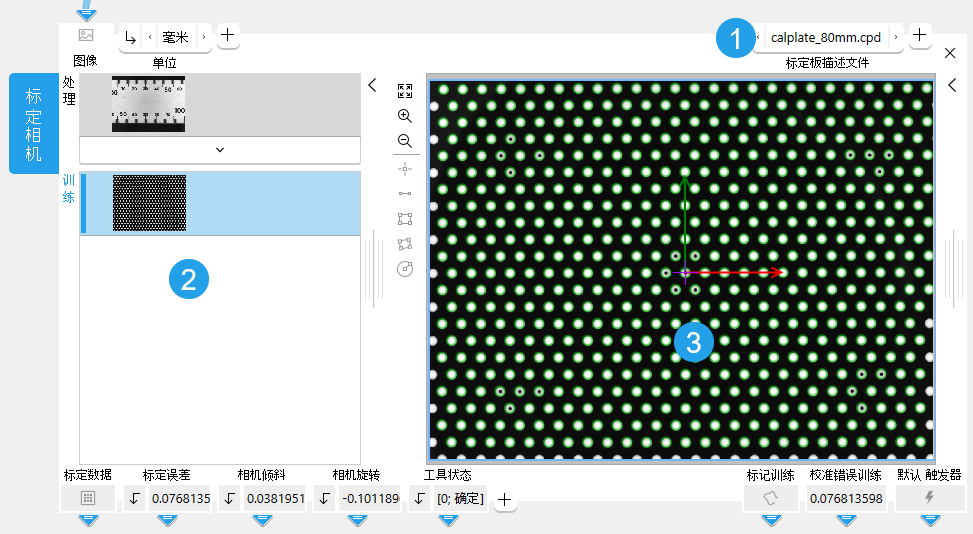
![]() 标定板描述文件
标定板描述文件
![]() 训练区域
训练区域
![]() 图形窗口
图形窗口
如何执行训练
要执行训练,请通过文件或相机设备采集标定板的图像。插入工具“标定相机”。将图像连接到工具“标定相机”的“图像”参数,并将其选为训练图像。训练将自动开始。如需详细信息,请参阅如何执行训练。
训练结果预览
要在运行处理模式时预览训练结果,可以将参数“相机设置模式”设置为 1。
相机设置
如果需要进行相机设置,请添加参数“相机设置模式”并设置为 1,以对 MERLIC 应用程序的每个执行周期执行标定。相机设置完成后,将该图像用作训练图像并将参数“相机设置模式”设置为“0”。这也能节省运行时间。参数“相机设置模式”设置为 1 时,每次更改参数也会自动开始训练。
选择训练图像
工具面板 左侧顶部的图像显示当前加载的图像,下方的图像显示训练图像。
插入工具时,当前处理图像会自动用作训练图像并执行训练。您还可通过以下步骤更改训练图像:
- 单步运行程序,直到所需图像在图形窗口中以及在“处理”区域中显示。
- 单击左侧训练区域中的
 按钮,用来自“处理”区域的图像替换当前训练图像。训练模式会自动激活,新的训练图像则会在图形窗口中显示。
按钮,用来自“处理”区域的图像替换当前训练图像。训练模式会自动激活,新的训练图像则会在图形窗口中显示。
标定结果
加载训练图像后,MERLIC 即显示检测到的标定标记,并提供标定结果(如果使用默认参数设置标定成功)。如果“相机设置模式”设置为“0”,工具结果始终基于上一次的成功训练。
标定之后,现实坐标系统的中心(即位置 [0,0])在“标定原点”上。它是右手习惯坐标系统,这意味着逆时针旋转 90 度是从 x 轴转到 y 轴。
然后,可以在后续工具中使用标定数据,即,通过 校正图像 来校正图像。此外,通过此工具,您还可以使用感兴趣区域 (ROI) 来定义图像中的已知长度并由此指定距相机某段距离处的像素大小。此工具仅在一个测量平面中进行标定。借助 ROI,您可以为与标定板平行、但处在不同水平上的对象定义参考长度。
标定板
您需要一个标定板来标定相机。您可以从当地 MERLIC 经销商获得各种尺寸和材质的标定板。有透明标定板可用于要求背光照明的应用。除了存储在子目录“calib”中的描述文件之外,还可以获得非标准标定板的个性化描述文件。
仅出于测试目的,您可以从 MERLIC 的“calib”目录(例如“%PROGRAMFILES%\MVTec\MERLIC-5.6\calib\”)中提供的“test_calibration_plates.pdf”文档打印 20 毫米、40 毫米、80 毫米和 160 毫米尺寸的标定板。
供打印的标定板并不准确,不能代替真正的标定板。如果为测试目的打印标定板,请确保您的打印机设置为打印“实际尺寸”或“100%”,并且不缩放或适应文档。
获得良好标定结果的规则:
- 使用足够大的标定板来填充图像的大部分区域。
- 圆形标记的最小直径应为 20 像素。
- 标定板的白色部分应具有至少 100 的灰度值。
- 标定板前景和背景之间的对比度,即,其亮和暗的部分,相应地应大于 100 灰度值。
- 使用标定板呈现均匀灰度值处的明度。
- 图像不得过度曝光,这意味着其在直方图中的峰值不得为 255。
参数
基本参数
图像:
当参数“相机设置模式”设置为 1 时,该参数表示用于标定相机的图像。连接到此参数的图像可被设为训练图像。
如果在此工具中将彩色图像用作输入图像,仅第一个通道(即红色通道)将用于处理。
单位:
使用此参数可将“标定数据”的单位从默认的标定板(“毫米”)转换为您为工具结果选择的单位。您可以在相应的连接器中更改其值。 这些结果可能稍有不同,具体视所选择的单位而定。如果插入了“参考 ROI”或带有指定“实际距离”的 ROI,“单位”会被忽略。
|
值 |
描述 |
|---|---|
|
纳米 |
标定信息指定单位为纳米。 |
|
微米 |
标定信息指定单位为微米。 |
|
毫米 |
标定信息指定单位为毫米。 |
|
厘米 |
标定信息指定单位为厘米。 |
|
米 |
标定信息指定单位为米。 |
|
点 |
标定信息指定单位为点。 |
|
pica |
标定信息指定单位为pica。 |
|
英寸 |
标定信息指定单位为英寸。 |
|
英尺 |
标定信息指定单位为英尺。 |
|
码 |
标定信息指定单位为码。 |
其他参数
参考 ROI:
此参数包含参考距离的图形表示,即,可以用来定义特定单位的比例和相应像素大小的已知长度的距离。它表示为 ROI。
默认情况下不定义任何 “参考 ROI”。如果您想要将“参考 ROI” 用于标定,您必须将参数连接至前一工具的适当 ROI 结果以确保“参考 ROI” 会传输到此工具,或者必须使用可用的 ROI 按钮在图像中绘制新的“参考 ROI”。“参考 ROI”一经定义,就需要在“实际距离”参数中输入已知长度。
此工具仅支持使用一个 ROI。如果 “参考 ROI” 包含多个 ROI,仅最后创建的 ROI 将用于处理。如果 “参考 ROI” 由圆形 ROI 表示,圆的直径将用作参考距离。如果将(与坐标轴平行的)矩形用作 “参考 ROI”,沿其方向的长轴长度将用作参考距离。
在要测量与标定板不在同一平面上的项目时,这种方法很有用。
实际距离:
此参数定义与由“参考 ROI”表示的指定已知参考距离相对应的实际距离。“参考 ROI”定义将用于后续测量的自定义单位。
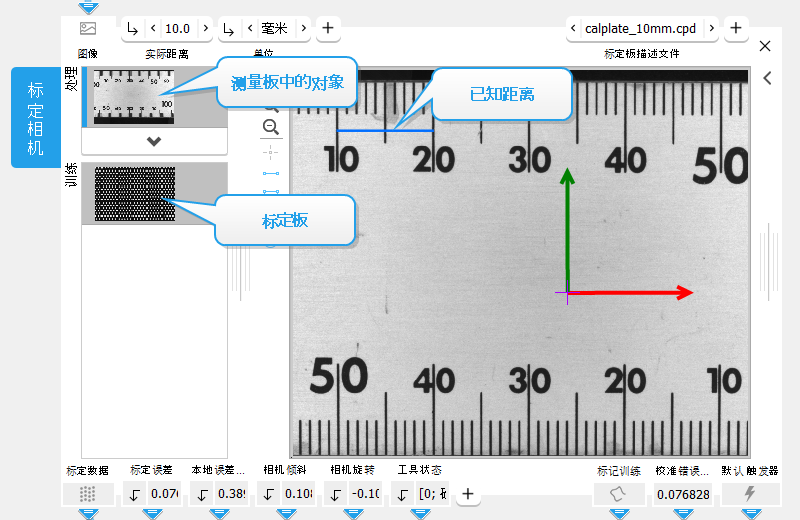
如果应用程序对象位于距相机不同的距离处,则像素大小以及失真也将可以确定。标定成功后,请在应用程序的测量平面中采集对象的图像。使用段 ROI 来标记已知距离并在参数连接器“实际距离”处输入值。由于 MERLIC 自身在运算时使用像素,设置“单位”为可选项。如果您希望看到公制的测量结果,应将其设置为适当的值,如“米”。
相机设置模式:
此参数定义了相机设置的模式。如果打开了“相机设置模式” (1),将随 MERLIC 的每个执行周期标定相机。在具有实时图像的应用程序中,这对设置相机可能有用。您还可以在处理模式下预览训练结果。默认情况下,此参数设置为 0。 如果关闭,将仅执行一次标定来保存运行时间。
训练参数
基本训练参数
标定板描述文件:
此训练参数包含用于训练的标定板描述文件。标定板是一个形状精确已知的对象。它包含一到五个由特殊标记六边形(即一个标记及其六个近邻,其中四个或六个标记包含一个孔)组成的定位图案。这些定位图案中的每一个均是唯一的,以使其可用于确定标定板的方向和定位图案在标定板上的位置。对于“标定数据”的训练,这些定位图案中的至少一个必须完全可见。
结果
基本结果
标定数据:
此结果包含校正可能的镜头失真和相对于图像平面的相机位置所需的已确定标定数据。
标定误差:
此结果表示标定的平均反向投影错误。它以像素表示,并提供优化是否成功的通用信息。如果将“相机设置模式”设置为 1,则它将从训练图像生成。否则,它将从处理图像生成。
大约 0.1 像素的“标定误差”指示优化非常符合观测数据。如果“标定误差”与 0.1 像素相差甚远,则标定效果不太好。
相机倾斜:
此结果返回相机的倾斜角度(单位为度),即相机与标定板之间的角度。将返回实数倾斜值,取值范围为 0° 到 90°。“相机倾斜”为 0° 表示相机与标定板垂直。如果“相机倾斜”为 90°,则表示相机与标定板平行。此信息可用于在设置过程中调整相机。
相机旋转:
此结果返回相机的旋转角度(单位为度),即对齐标定板时的旋转角度。将返回实数旋转值,取值范围为 -180° 到 180°。下表描述了如何旋转标定板。
|
相机旋转 |
示例图像 |
描述 |
|---|---|---|
|
相机旋转 = 0 |
|
标定板未旋转:
|
|
相机旋转 > 0 |
|
标定板顺时针旋转:
示例图像显示顺时针旋转 40° 的标定板。确定的“X 轴”(红色)和“Y 轴”(绿色)显示标定板的方向。示例中生成的“相机旋转”为“40”。 |
|
相机旋转 < 0 |
|
标定板逆时针旋转:
示例图像显示逆时针旋转 40° 的标定板。确定的“X 轴”(红色)和“Y 轴”(绿色)显示标定板的方向。生成的“相机旋转”为“-40”。 |



如果“相机旋转”为 180° 或 -180°,结果可能在 -180° 与 180°之间跳跃。“相机旋转”信息可用于在设置过程中调整相机。
工具状态:
“工具状态”返回有关工具状态的信息,因此可用于处理错误。请参阅主题工具状态结果,了解关于不同工具状态结果的更多信息。
其他结果
标定原点:
此结果返回所使用标定板的起始点,即,坐标系统的中心。 返回的结果为点 ROI
本地误差上限:
此结果返回每个标记与其反向投影之间的最大误差。从而确定与相应反向投影标记的距离。然后返回实数值的最大偏离(单位为像素)。
全局误差上限:
此结果返回全局错误上限。从而确定左上方标记与右下方标记之间的距离,以及与反向投影的相应距离的对比。然后返回实数值的最大偏离(单位为像素)。
标记:
此结果包含从处理图像中提取的标定标记的轮廓。根据参数“相机设置模式”的设置,“标记”提供不同的结果。
如果“相机设置模式”设置为 1,“标记”将返回处理图像的已提取标定标记。在比较标定数据时此方法可能会有帮助。如果处理图像没有显示标定板,则无法提取标定标记,因此“标记”为空。
如果“相机设置模式”设置为“0”,由于没有对处理图像执行标定,则“标记”为空。
X 轴:
此结果表示确定的 x 轴。 返回的结果为轮廓,并以红色直观地显示。
Y 轴:
此结果表示确定的 y 轴。 返回的结果为轮廓,并以绿色直观地显示。
处理时间:
此结果返回最近一次执行工具的持续时间(以毫秒为单位)。该结果作为附加结果提供。因此,默认情况下它是隐藏的,但是可以通过工具结果旁边的 ![]() 按钮显示。有关更多信息,处理时间请参工具参考中所阅部分。
按钮显示。有关更多信息,处理时间请参工具参考中所阅部分。
训练结果
基本训练结果
标记训练:
此结果返回所找到标定标记的轮廓。
标定误差训练:
此结果以像素为单位返回标定错误。
应用程序示例
此工具用于以下 MERLIC Vision App 示例:
- calibrate_for_ruler_changed_distance.mvapp
- calibrate_for_ruler_distorted.mvapp
- calibrate_for_ruler_simple.mvapp

