转换区域
通过此工具可使用不同的方法来转换区域。
该工具要求前一工具可提供和发送区域。因此,“区域”参数必须与前一工具的适当结果连接。
参数
基本参数
图像:
使用此参数将图像设置为背景。这通常应该是处理的特征(如轮廓或 ROI)所连接的图像。如果未连接图像,背景将会是黑色。
区域:
此参数表示输入区域。必须从前一工具接收这些区域。因此,您必须将参数与前一工具的相应结果连接。已连接的区域随后用作转换的输入。区域的边缘以定义的“区域输入”颜色高亮显示,例如,默认为红色。这让区分输入区域和已转换区域变得更容易。
方法:
此参数定义了用于转换区域的方法。默认情况下,会选择“已填充”作为“方法”。您可以从相应参数的组合框选择不同的方法。
|
值 |
描述 |
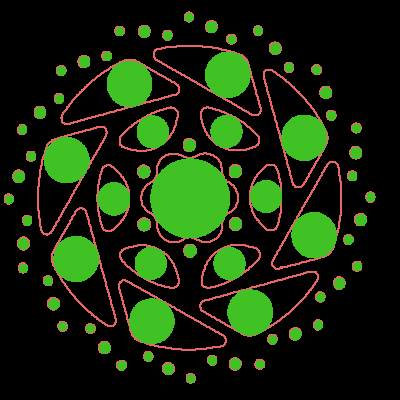
原始区域 |
已转换区域 |
|---|---|---|---|
|
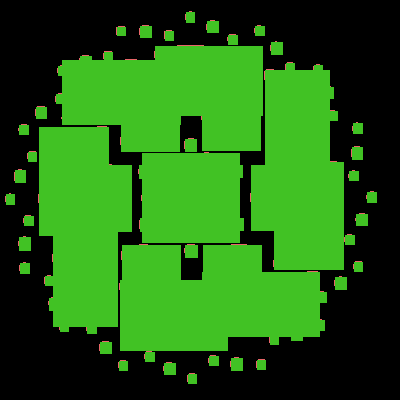
已填充 |
使用此方法可填充区域。区域数量保持不变。 |
|
|
|
凸包 |
使用此方法可计算围绕每个区域的凸包。 |
|
|
|
等效椭圆 |
使用此方法可计算与每个区域共享相同力矩和面积的椭圆。 |
|
|
|
外圆 |
使用此方法可计算围绕每个区域拟合的最小的圆。 由于运算的缘故,原始区域可能会比返回的圆形区域突出最多 1 个像素。 |
|
|
|
内圆 |
使用此方法可计算每个区域中拟合的最大的圆。 |
|
|
|
与坐标轴平行的矩形 |
使用此方法可计算图像中环绕每个区域拟合的最小的与坐标轴平行的矩形。 |
|
|
|
矩形 |
使用此方法可计算图像中环绕每个区域拟合的最小的矩形。 |
|
|
|
内与坐标轴平行的矩形 |
使用此方法可计算每个区域中拟合的最大的与坐标轴平行的矩形。 |
|
|
|
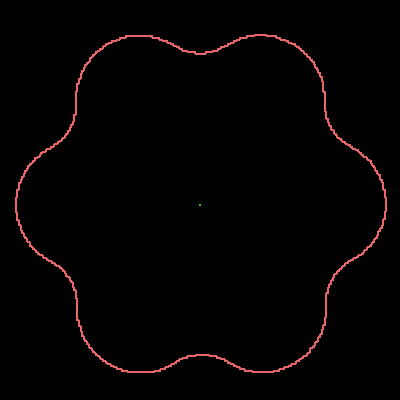
内心 |
使用此方法可获得框架上距离输入区域的重心最近的点。 |
|
|
|
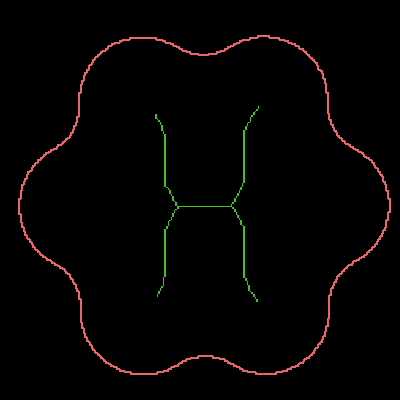
框架 |
使用此方法可计算每个区域的框架,即输入区域的中轴。框架的构造方式为,框架上的每个点都可以被视为区域内半径最大、但同时仍完全包含在区域内的圆的中心点。 |
|
|
|
补充 |
使用此方法可得到区域的补充。此运算使用与原始图像域相交的“并集”的补充。 |
|
|
|
并集 |
使用此方法可将分开的区域合并成由所有输入区域组成的一个区域。 这种并集效果无法以可视化的方式呈现。此方法与 “分开”相反。 |
|
|
|
分开 |
使用此方法可将由各个控件组成的区域分成每个控件一个区域。 这种分开效果无法以可视化的方式呈现。此方法与 “并集”相反。 |
|
|
|
边界 |
使用此方法可得到每个区域的边缘。此轮廓计算通过形态学运算完成。生成的输出区域仅由输入区域的最小边界组成。轮廓位于原始区域内。 |
|
|





结果
基本结果
已转换区域:
此结果为按所选方法转换的区域。
工具状态:
“工具状态”返回有关工具状态的信息,因此可用于处理错误。请参阅主题工具状态结果,了解关于不同工具状态结果的更多信息。
其他结果
处理时间:
此结果返回最近一次执行工具的持续时间(以毫秒为单位)。该结果作为附加结果提供。因此,默认情况下它是隐藏的,但是可以通过工具结果旁边的 ![]() 按钮显示。有关更多信息,处理时间请参工具参考中所阅部分。
按钮显示。有关更多信息,处理时间请参工具参考中所阅部分。
应用程序示例
此工具用于以下 MERLIC Vision App 示例:
- classify_and_inspect_wood.mvapp
- count_defect_clusters.mvapp

