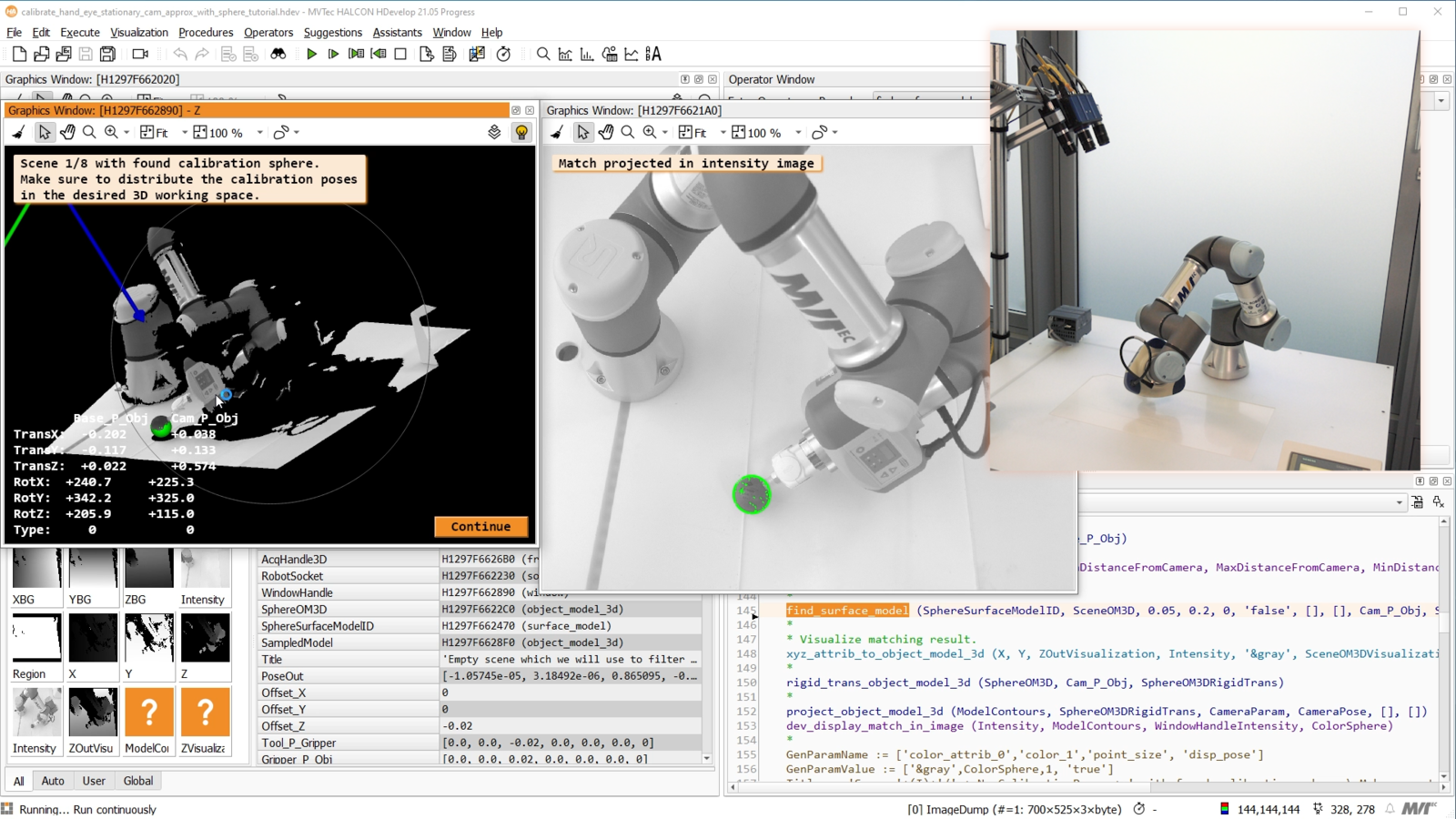
In this tutorial, we use HDevelop to perform a quick and easy approximate hand-eye calibration. This hand-eye calibration is necessary to pick and place objects, which are observed by a stationary 3D sensor, with a robot. There are multiple ways to perform a hand-eye calibration with HALCON - in this video, the robot holds a ping pong with its gripper while the 3D sensor acquires image data. With the corresponding poses, we can calibrate the transformation from the camera coordinate system into the robots coordinate system. We show several approaches to check the calibration and then pick and place a object using the calibration result.

Approximate hand-eye calibration with MVTec HALCON (stationary 3D sensor)
Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.