仮想デバイスとしてシミュレートされた PLC
MERLIC では、デフォルトで、Hilscher card と同じ通信プロトコルで仮想デバイスとして シミュレートされた PLC に接続するプラグインが提供されます。この仮想デバイスは、ハードウェアから独立した通信シミュレーションに利用できます。シミュレートされた PLC は、2 つの定義済みのプログラムのいずれかを実行するように、MERLIC RTE Setup の「![]() I/O」タブで構成することができます。いずれのプログラムも、オプションで、ユーザーが設定した実行回数の後に「PrepareRecipe」をコールすることにより、レシピ MERLIC レシピファイルは、MERLIC プロセス統合に不可欠の要素です。独立したファイルであり (ファイル拡張子は .mrcp)、プロセス統合用にどの MERLIC Vision App を読み込むか定義します。また、選択されたツールパラメーター用に事前に定義された入力値のセットを含んでおり、MVApp によるパラメーター化の方法も定義します。
同一の MVApp について、異なる入力値のセットを含む複数のレシピファイルを作成することができます。これにより、アプリケーションの様々なシナリオについて、異なるパラメーター設定の MVApp を再使用できます。レシピファイルを使用して、まったく別の画像処理タスク用に MVApp を読み込むこともできます。のリストを循環させることができます。
I/O」タブで構成することができます。いずれのプログラムも、オプションで、ユーザーが設定した実行回数の後に「PrepareRecipe」をコールすることにより、レシピ MERLIC レシピファイルは、MERLIC プロセス統合に不可欠の要素です。独立したファイルであり (ファイル拡張子は .mrcp)、プロセス統合用にどの MERLIC Vision App を読み込むか定義します。また、選択されたツールパラメーター用に事前に定義された入力値のセットを含んでおり、MVApp によるパラメーター化の方法も定義します。
同一の MVApp について、異なる入力値のセットを含む複数のレシピファイルを作成することができます。これにより、アプリケーションの様々なシナリオについて、異なるパラメーター設定の MVApp を再使用できます。レシピファイルを使用して、まったく別の画像処理タスク用に MVApp を読み込むこともできます。のリストを循環させることができます。
- 最初のプログラムは、「StartSingleJob」を使用して 1 回の実行を繰り返しトリガーします。
- 2 番目のプログラムは、「StartContinuous」を使用して連続実行をトリガーし、ユーザーが設定した実行回数後に停止します。
詳細については、「コマンド (Hilscher)」を参照してください。
シミュレートされた PLC のセットアップおよび実行のプロセスは、以下の基本的なステップで構成されます:
- MERLIC RTE Setup の「レシピ」タブに少なくとも 1 つのレシピをインポートします。レシピの詳細については、「MERLIC レシピファイル」を参照してください。
- 「I/O」タブに切り替え、シミュレートされた PLC を有効にします。
- 指定されたパラメーターを使用して シミュレートされた PLC を構成し、変更を保存します。
- MERLIC RTE の開始および停止 の説明に従って、プロセス統合モード (MERLIC RTE モード) で MERLIC を起動します。
シミュレートされた PLC の構成に使用可能なパラメーターの詳細については、シミュレートされた PLC の構成の節で説明されています。
データ通信に関する情報は、記録設定に従ってログファイル「merlic_rte_*.log」に追加されます。シミュレートされた PLC に推奨される記録設定は "trace" です。詳細については、「記録」を参照してください。
シミュレートされた PLC の有効化
まず、MERLIC RTE Setup で シミュレートされた PLC を選択し有効化する必要があります。
- MERLIC RTE Setup を開き、「I/O」タブに移動します。
- 「
 リフレッシュ」をクリックして、利用可能な I/O デバイスのリストを更新します。詳細については、「I/O デバイスのセットアップ」を参照してください。
リフレッシュ」をクリックして、利用可能な I/O デバイスのリストを更新します。詳細については、「I/O デバイスのセットアップ」を参照してください。 - シミュレートされた PLC を選択し、ダブルクリックまたは「
 デバイスを有効化」ボタンのクリックで有効化します。
デバイスを有効化」ボタンのクリックで有効化します。
I/O デバイスを有効化すると、そのデバイスの各構成が右側に表示されます。MERLIC には シミュレートされた PLC 用のデフォルト構成があり、MERLIC RTE Setup の右側に表示されます。
バイト順 の構成
データ通信用のバイト順を選択します。
- デバイスのリストで シミュレートされた PLC を選択します。
- 「バイト順」のドロップダウンメニューをクリックし、目的の値を選択します。
- LittleEndian
- BigEndian
- 構成を保存します。
新しいバイト順が MERLIC5.ini に保存されます。ログファイル「merlic_rte_*.log」では、バイト順の選択が送信されるバイトの順序にどのように影響するか確認できます。
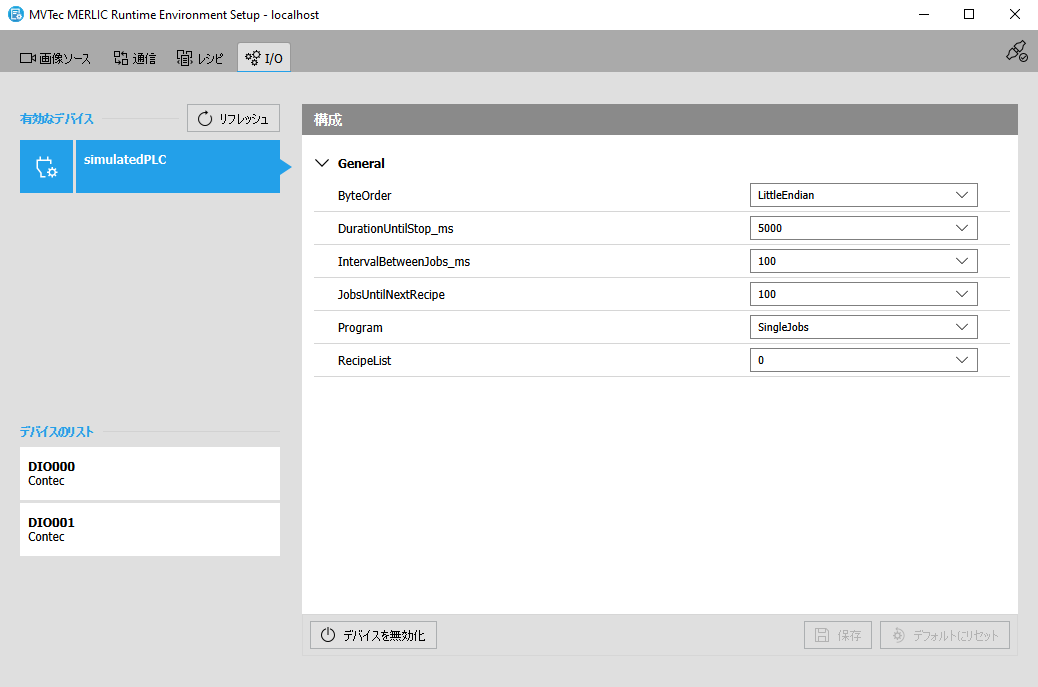
シミュレートされた PLC の構成
テスト用に シミュレートされた PLC を構成するには、MERLIC RTE Setup の「I/O」タブで シミュレートされた PLC が有効になっており、 選択されていることを確認します。使用可能なパラメーターは、構成エリアの右側に表示されます。ここで、テストするレシピ、実行モード (すなわち、1 回の実行または連続実行)、バイト順または次のレシピが読み込まれるタイミングを決定する様々な時間値など、その他のパラメーターを選択することができます。
次の表は、使用可能なパラメーターの概要を示しています。
|
パラメーター |
説明 |
値の範囲 |
|---|---|---|
|
ByteOrder |
データ通信用のバイト順。ログファイル「merlic_rte_*.log」では、バイト順の選択が送信されるバイトの順序にどのように影響するか確認できます。 |
LittleEndian BigEndian |
|
DurationUntilStop_ms |
このパラメーターは、連続実行の場合、つまり、パラメーター「Program」について「ContinuousJobs」が選択されている場合にのみ関連します。停止信号が送信されるまでの、連続実行が継続される時間を定義します。時間はミリ秒 (ms) 単位で定義されます。 例: このパラメーターが 5000 に設定されている場合、レシピファイルで参照されている MERLIC Vision App の連続実行は 5000 ミリ秒後に停止します。 |
5000, 1000, 10000 |
|
IntervalBetweenJobs_ms |
このパラメーターは、2 つのジョブの間の間隔、つまり、 2 つの「SingleJobs」または 2 つの「ContinuousJobs」の間の時間を定義します。ミリ秒 (ms) 単位で定義します。 例: このパラメーターが 100 に設定され、パラメーター「Program」について「SingleJobs」が選択されている場合、MERLIC は、1 回の実行の後、次の実行を開始するまで 100 ミリ秒待機します。 |
100, 0, 5000 |
|
JobsUntilNextRecipe |
このパラメーターは、パラメーター「RecipeList」で定義されたレシピのリストから次のレシピが読み込まれるまでに実行されるジョブの数を定義します。レシピは、「RecipeList」で複数のレシピが選択されている場合にのみ変更されます。 |
100, 1, 10 |
|
Program |
このパラメーターを使用して、実行モードを選択することができます。「SingleJobs」の場合、1 回の実行のシーケンスが実行され、「ContinuousJobs」の場合、連続実行のシーケンスが実行されます。 シミュレートされた PLC を使用して MERLIC プロセス統合モードを起動する場合、「SingleJobs」または「ContinuousJobs」の実行は、それぞれ、他のパラメーターの構成に応じて実行されます: 「SingleJobs」の場合、実行の内部ステップは次の通りです:
「ContinuousJobs」の場合、実行の内部ステップは次の通りです:
|
SingleJobs ContinuousJobs |
|
RecipeList |
このパラメーターは、使用されるレシピの ID を定義します。レシピは、各レシピ ID を含むコンマ区切りリストで指定されます。実行中に、選択されたレシピが交互に切り替わります。最大 4 つのレシピを選択して切り替えることができます。 レシピを変更するタイミングは、パラメーター「JobsUntilNextRecipe」で定義されます。10 に設定した場合、現在準備されているレシピが 10 個のジョブ (「SingleJobs」または「ContinuousJobs」) に対して実行された後、レシピリストからの次のレシピが準備され、その後も同様に切り替わります。リストに含まれるレシピ ID が 1 つだけの場合、レシピは 1 回だけ準備され、すべてのジョブがこのレシピを使用して実行されます。リストが空の場合、デフォルトのレシピを使用してすべてのジョブが実行されます。ただし、デフォルトのレシピが使用できない場合、レシピ 0 が使用されます。 |
0 0,1 0,1,2 0,1,2,3 |
構成は MERLIC5.ini ファイルに自動的に追加されます。したがって、INI ファイルを手動で調整する必要はありません。
構成のリセット
デバイスのデフォルト構成を復元するには、「I/O」タブの下部にある「![]() デフォルトにリセット」をクリックして、加えた変更をリセットできます。
デフォルトにリセット」をクリックして、加えた変更をリセットできます。