領域を判定
このツールでは、特定の特徴に従って領域を判定します。
領域が使用可能で、前のツールから供給されることがこのツールの条件です。したがって、パラメーター「領域」は、前のツールの適切な結果に接続します。
そこで、判定される領域をまず前のツールで抽出し、次に得られた領域をこのツールに接続します。
このツールには easyTouch および easyTouch+ を利用することができます。 これは、「最小特徴値」および「最大特徴値」を使用して測定済みの領域をフィルタリングする一方で、すべての領域が測定され、対応するパラメーターが自動的に調整されることを意味します。
判定を開始するには、判定する特徴を選択します。現在定義されているパラメーター設定に合致した領域は '合格' に定義した色 (デフォルトで緑色) でハイライトされます。さまざま領域を選択するには、マウスを評価対象の目的の領域に合わせます。MERLIC では、判定対象になる類似のプロパティの領域が、定義した easyTouch 色 (デフォルトで青色など) でハイライトされます。判定対象にならない領域は '不合格' に定義した色 (デフォルトで赤色など) でハイライトされます。選択した領域を判定するには、その領域をクリックして選択結果を確定します。特徴のパラメーターは、選択した領域に合わせて自動的に調整されます。ただし、対応するコネクターでは、手動でも調整できます。
あるいは、固定した特徴値に基づいて領域を判定することもできます。パラメーター値を手動で設定すると、そのパラメーター設定に適合するすべての領域が緑色にハイライトされます。
パラメーター
基本パラメーター
画像:
このパラメーターを使用して、画像を背景として設定します。通常は、処理済みの特徴 (輪郭または ROI など) の元となる画像でなければなりません。画像が接続されていない場合、背景は黒色になります。
色画像をこのツールの入力として使用すると、最初のチャンネル (赤いチャンネル) のみが処理の対象になります。
これは、最小グレイ値 など、グレイ値に関係のあるパラメーター「特徴名」および「特徴値」の値にのみ適用されます。
領域:
このパラメーターは、判定する領域を表します。領域は、前のツールから提供されることとします。したがって、このパラメーターを前のツールのそれぞれの結果に接続する必要があります。接続した領域は、判定に使用されます。領域の余白が、'領域入力' に定義した色でハイライトされます。例、デフォルトで赤色。これで、判定する領域を簡単に認識できます。
特徴名:
このパラメーターは領域のために判定された特徴の名前を定義します。このパラメーターのデフォルト設定値は「面積」です。これは、たとえば許容される面積内であれば選択した領域の面積が判定されることを意味します。対応するコネクターで評価する異なる特徴を選択することもできます。
|
値 |
説明 |
値の範囲 |
単位 |
|---|---|---|---|
|
数 |
領域数は判定に適用されます。 |
0 ... 10 000 000 |
- |
|
インデックス |
判定では、領域の入力配列内のゼロベースインデックスを使用します。 この値は、要求したインデックスのすべての領域が利用できるかどうかを確認するときに使用できます。 |
0 ... 10 000 000 |
- |
|
面積 |
領域は、その面積に応じて判定されます。 |
0 ... 10 000 000 |
ピクセル |
|
縦横比 |
判定には領域の不等性 (領域と同じアスペクト比の楕円の長径と短径の関係) を使用します。 |
1 ...10 000 000 |
- |
|
真円度 |
領域の判定は、円と、その領域の類似性に基づいて行われます。 |
0 ..1 |
- |
|
凸性 |
領域の判定は、その凸性に基づいて行われます。 |
0 ..1 |
- |
|
コンパクト性 |
領域の判定は、そのコンパクトさ (領域と穴のコース) に基づいて行われます。領域が長く、穴がある場合、コンパクトさは 1 を超えます。 |
1 ...10 000 000 |
- |
|
矩形性 |
領域の判定は、長方形に対する類似性に基づいて行われます。 |
0 ..1 |
- |
|
X 中心 |
領域の判定は、カラム中心の座標に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
Y 中心 |
領域の判定は、行中心の座標に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
幅 |
領域の判定は、座標軸に平行で、それらの領域の周囲を囲む矩形の幅に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
高さ |
領域の判定は、座標軸に平行で、それらの領域の周囲を囲む矩形の高さに基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
内幅 |
領域の判定は、領域にフィットする最大軸平行長方形の幅に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
内高 |
領域の判定は、領域にフィットする最大軸平行長方形の高さに基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
内半径 |
領域の判定は、領域にフィットする最大内円の半径に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
外半径 |
領域の判定は、領域を囲む最小外円の半径に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
X 始点 |
領域の判定は、座標軸に平行で、それらの領域の周囲を囲む矩形の左上角の点の列座標に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
Y 始点 |
領域の判定は、座標軸に平行で、それらの領域の周囲を囲む矩形の左上角の点の行座標に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
X 終点 |
領域の判定は、座標軸に平行で、それらの領域の周囲を囲む矩形の右下角の点の列座標に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
Y 終点 |
領域の判定は、座標軸に平行で、それらの領域の周囲を囲む矩形の右下角の点の行座標に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
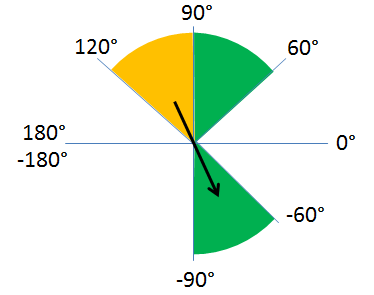
方向 |
領域の判定は、その向きに基づいて行われます。 領域は逆象限の対応する角度でも選択できるので、結果「特徴値」で戻る向きの決定値の範囲は -90°から 90°です。 例:「最小特徴値」を 60°に設定し、「最大特徴値」を 120°に設定すると、60°から 90° と -90°から -60°の向きのすべての領域が対象に分類されます。 90 から 120 の範囲では、逆象限の角度の範囲は -90 から -60 なので、このような結果になります。
|
-180 ...180 |
度 |
|
穴の面積 |
領域の判定は、領域内の穴の面積に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
穴の数 |
領域の判定は、領域内の穴数に基づいて行われます。 |
0 ... 10 000 000 |
- |
|
最大直径 |
領域の判定は、領域の 2 点の境界点間の最長距離に基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
長辺 |
領域の判定は、各領域の周囲を囲む矩形の最初の半分の長さに基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
短辺 |
領域の判定は、各領域の周囲を囲む矩形の 2 番目の半分の長さに基づいて行われます。 |
0 ... 10 000 000 |
ピクセル |
|
最小グレイ値 |
領域の判定は、その最小グレイ値に基づいて行われます。 |
グレイ値 |
|
|
最大グレイ値 |
領域の判定は、その最大グレイ値に基づいて行われます。 |
グレイ値 |
|
|
平均グレイ値 |
領域の判定は、領域の平均濃淡値に基づいて行われます。 |
グレイ値 |
|
|
中央値グレイ値 |
領域の判定は、濃淡値の中央値に基づいて行われます。 |
グレイ値 |
|
|
グレイ値偏差 |
領域の判定は、濃淡値の偏差に基づいて行われます。 |
グレイ値 |
最小特徴値:
このパラメーターは判定した特徴の最小値を定義します。デフォルト設定値は 150 です。判定する領域を手動で選択すると、調整が自動的に行われます。この特徴値は、判定の基準値としても使用できます。希望する値をコネクターに設定すると、現在のパラメーター設定に合ったすべての領域が緑にハイライトされます。値は、0 から 10 000 000 の範囲で設定できますが、「最大特徴値」が上限になります。ただし、実際の値の範囲は画像のピクセルタイプと現在選択されている特徴によって異なります。たとえば「方向」を「特徴名」に選択すると、設定できる値の範囲は -180 から 180 だけになります。特徴ごとに利用できる値の範囲については、パラメーター「特徴名」の解説の表を参照してください。
最大特徴値:
このパラメーターは、判定した特徴の最大値を定義します。デフォルト設定値は 100 000 です。判定する領域を手動で選択すると、調整が自動的に行われます。この特徴値は、判定の基準値としても使用できます。希望する値をコネクターに設定すると、現在のパラメーター設定に合ったすべての領域が緑にハイライトされます。値は、0 から 10 000 000 の範囲で設定できますが、「最小特徴値」が下限になります。ただし、実際の値の範囲は画像のピクセルタイプと現在選択されている特徴によって異なります。たとえば「方向」を「特徴名」に選択すると、設定できる値の範囲は -180 から 180 だけになります。特徴ごとに利用できる値の範囲については、パラメーター「特徴名」の解説の表を参照してください。
追加パラメーター
特徴値許容範囲:
このパラメーターは、「特徴名」における定義済み特徴の許容値を定義します。このパラメーターは、easyTouch で特徴値を決定する場合のみ有効です。それ以外、このパラメーターは領域の判定には反映されません。そのため、パラメーター「特徴名」で選択された名前によっては、コネクター「特徴値許容範囲」がグレイ表示になります。つまり、現在選択されている名前で扱っている限り、使用には関係ないということです。
パラメーターの処理は、「特徴名」で選択した特徴によって異なります。特徴によっては、領域の実際の特徴値が「最小特徴値」と「最大特徴値」に設定した値を超過してよい割合を示すパーセント値を、このパラメーターで定義します。他の特徴の場合、輪郭の実際の特徴値が最小値と最大値を超過してよい割合を示す絶対値を、このパラメーターで定義します。さらに、「数」や「インデックス」など、一部の特徴では、「特徴値許容範囲」を考慮しません。以下の表は、どの特徴が影響を受けるか、また、百分率の値や絶対値を使用するかどうかを示しています。
「特徴値許容範囲」の設定値は、デフォルトで 20 です。選択した領域の特徴の最大値と最小値を easyTouch で決定する場合、MERLIC では、特徴値が定義した許容値の範囲内におさまるすべての領域が判定の対象になります。たとえば、特徴「幅」を「特徴名」で選択し、「特徴値許容範囲」を 10 に設定すると、選択した領域よりも幅が最大で 10% 超過する領域や最大で 10% 不足する領域はすべて判定の対象になります。必要に応じてその値はコネクターで手動で変更してください。設定できる範囲は、0 から 100 です。
|
値 |
影響の有無 |
パーセント値 |
絶対値 |
|---|---|---|---|
|
数 |
|
|
|
|
インデックス |
|
|
|
|
面積 |
✔ |
✔ |
|
|
縦横比 |
✔ |
✔ |
|
|
真円度 |
✔ |
✔ |
|
|
凸性 |
✔ |
✔ |
|
|
コンパクト性 |
✔ |
✔ |
|
|
矩形性 |
✔ |
✔ |
|
|
X 中心 |
✔ |
|
✔ |
|
Y 中心 |
✔ |
|
✔ |
|
幅 |
✔ |
✔ |
|
|
高さ |
✔ |
✔ |
|
|
内幅 |
✔ |
✔ |
|
|
内高 |
✔ |
✔ |
|
|
内半径 |
✔ |
✔ |
|
|
外半径 |
✔ |
✔ |
|
|
X 始点 |
✔ |
|
✔ |
|
Y 始点 |
✔ |
|
✔ |
|
X 終点 |
✔ |
|
✔ |
|
Y 終点 |
✔ |
|
✔ |
|
方向 |
✔ |
|
✔ |
|
穴の面積 |
✔ |
✔ |
|
|
穴の数 |
✔ |
|
✔ |
|
最大直径 |
✔ |
✔ |
|
|
長辺 |
✔ |
✔ |
|
|
短辺 |
✔ |
✔ |
|
|
最小グレイ値 |
✔ |
|
✔ |
|
最大グレイ値 |
✔ |
|
✔ |
|
平均グレイ値 |
✔ |
|
✔ |
|
中央値グレイ値 |
✔ |
|
✔ |
|
グレイ値偏差 |
✔ |
|
✔ |
結果
基本結果
受け入れ領域:
この結果では、受け入れた領域が返ります。輪郭は、'ok' に定義した色設定で表示されます。例、デフォルトで緑色。判定した特徴の値が定義した値の範囲内におさまれば、領域は受け入れられます。
拒絶領域:
この結果では、拒絶領域が返ります。これらの領域は、'不合格' に定義した色 (デフォルトで赤色など) の設定で表示されます。判定した特徴の値が、定義した値の範囲内におさまらず、許容範囲外になると、領域は拒否されます。
特徴値:
この結果で、評価された領域の実際の特徴値が返ります。これらは、実数としてタプルで返ります。
すべての領域が受け入れられました:
この結果では、すべての領域を受け入れたかどうかを示すブール値が返ります。判定した領域の特徴値がすべて許容値の範囲内にあれば、値 1 が返ります。1 つ以上の領域の特徴値が値の範囲内に収まらない場合、ブール値 0 が返ります。判定する特徴として「インデックス」を選択した場合、この結果によって、「最小特徴値」と「最大特徴値」に定義したそれぞれのインデックスのすべての領域が画像で得られるかどうかがわかります。
ツール状態:
「ツール状態」はツール状態の情報を返します。したがって、エラー処理に使うことができます。さまざまなツールの状態結果の詳細については、 ツール状態 結果 のトピックを参照してください。
追加結果
受け入れられた領域数:
この結果では、受け入れられた領域数、すなわち、その特徴値が許容特徴値範囲内におさまる領域の数が返ります。
拒否された領域数:
この結果では、拒否された領域数、すなわち、その特徴値が許容特徴値範囲内におさまらなかった領域の数が返ります。
処理時間:
この結果は、ツールの直近の実行の持続時間をミリ秒単位で返します。結果は、追加結果として提供されます。したがって、デフォルトでは非表示になっていますが、ツール結果の横にある ![]() ボタンを使用して表示できます。詳細については、ツールリファレンス概要の処理時間の節を参照してください。
ボタンを使用して表示できます。詳細については、ツールリファレンス概要の処理時間の節を参照してください。
アプリケーションの例
このツール、以下の MERLIC Vision App 例で使用します:
- check_correct_filling_on_3d_height_images.mvapp
- classify_and_inspect_wood.mvapp
- count_defect_clusters.mvapp
- segment_pill_defects.mvapp
- segment_pills_by_shape.mvapp

