マッチングによる有り無し検査
このツールでは、マッチングによりオブジェクトの有無を確認します。
このツールは、トレーニングモードとともに使用されます。 これは、選択した基準オブジェクトと指定したトレーニングパラメーターに従ってトレーニングを行う必要があることを意味します。トレーニングパラメータを設定するか変更するとトレーニングは自動的に開始します。
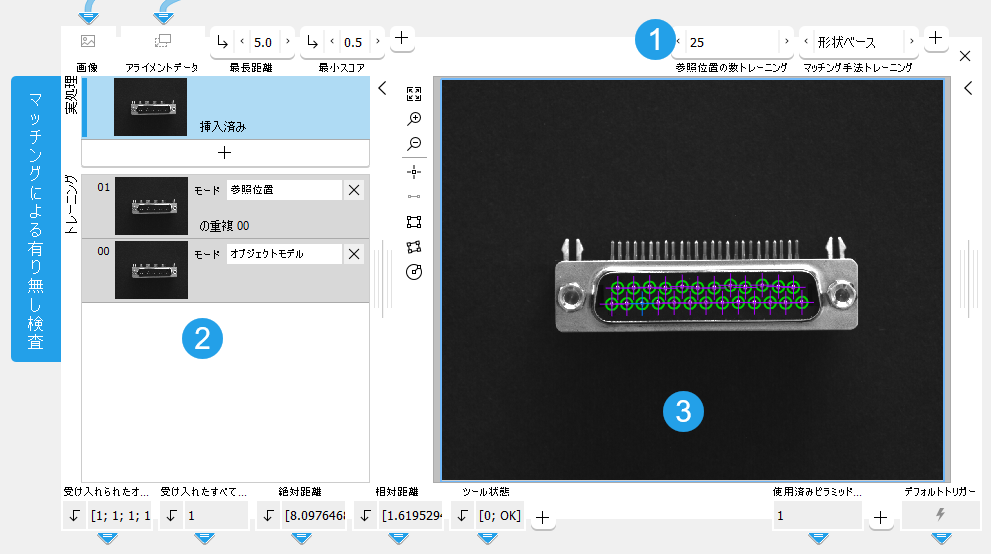
ツールでは、ツールボード の左側にトレーニングエリアが表示されます。トレーニングエリアでは、各画像をクリックすると、検索の処理モードとマッチングモデルのトレーニングのトレーニングモード間を切り替えることができます。グラフィックスウィンドウには、現在有効なモードの画像が表示され、トレーニングエリアで青色にハイライトされます。左上の検索パラメータに加えて、このツールには、右上にトレーニング用のパラメータが表示されます。
トレーニングが必要なツールの使用方法の詳細については、トピックトレーニングモードの使用を参照してください。
ツールボード は、 の左側のトレーニングエリアと右側のグラフィックウィンドウに分割されます。
![]() トレーニングパラメーター
トレーニングパラメーター
![]() トレーニングエリア
トレーニングエリア
![]() グラフィックウィンドウ
グラフィックウィンドウ
表示された画像
トレーニングセクションには、処理画像と 2 つのトレーニング画像の計 3 つの画像が表示されます。
- 処理画像: 前のツールから受け取った現在の「画像」。
- 2 つのトレーニング画像: この 2 つのトレーニング画像は、基準オブジェクトと、画像でオブジェクトが想定される基準位置を定義します。
トレーニング設定の定義
トレーニングパラメータを設定するか変更するとトレーニングは自動的に開始します。
トレーニング画像およびトレーニングモードの選択
トレーニングには、トレーニング画像が 2 つ必要です:
- 1 つは、モード「オブジェクトモデル」用のトレーニング画像です。このモードは、トレーニング用の基準オブジェクトの定義に使用します。
- もう 1 つのトレーニング画像は、モード「参照位置」用であり、画像内のオブジェクトの期待される位置のトレーニングに使用します。
画像をトレーニングエリアに転送するには、![]() ボタンをクリックしてこれらの画像を選択します。画像には、「未使用」のマークが付き、モードは手動で割り当てます。
ボタンをクリックしてこれらの画像を選択します。画像には、「未使用」のマークが付き、モードは手動で割り当てます。
トレーニングエリアにさらに画像を追加すると、「未使用」のマークが付きます。これは、「参照位置」用と「オブジェクトモデル」用に画像は、それぞれ同時に 1 つずつしか選択できないためです。ただし、有用な画像を「未使用」として準備し、それらでトレーニングをテストすることができます。その場合、それらの画像を、「オブジェクトモデル」または「参照位置」に現在選択されている画像と置き換えることができます。まず、対応する画像をモード「未使用」に設定し、別の画像に新しいモードを設定します。
また、トレーニングには別の画像を選択することもできます。目的の画像がグラフィックスウィンドウと実処理エリアに表示されるまで、シングルステップでアプリケーションを実行します。![]() ボタンをクリックして画像をトレーニングエリアに転送し、トレーニング画像を目的のモードに設定します。
ボタンをクリックして画像をトレーニングエリアに転送し、トレーニング画像を目的のモードに設定します。
トレーニングパラメーターの設定
トレーニング用の基準オブジェクトの定義
- ツールボード の左側の「オブジェクトモデル」のレーニング画像をクリックします。この画像は、グラフィックスウィンドウに表示され、ここから基準オブジェクトを選択して開始します。定義できる基準オブジェクトは 1 つだけです。追加の ROI は基準オブジェクトの一部となります。
- 検索の基準オブジェクトとして使用するオブジェクトの上に、1 つまたは複数の 検査対象領域 (ROI) を描画します。特に、基準オブジェクトの形状が 1 つの RIO にフィットしない場合、有無チェックのロバスト性強化のため ROI を複数使用することを推奨します。
トレーニングパラメーターは、ツールの右上に表示されます。トレーニングパラメーターは、選択したモデル ROI に自動的に調整されます。モデル ROI を変更するたびに、トレーニングパラメーターの評価も行われます。
予想発生数の定義
- トレーニングパラメーター「参照位置の数」の画像で想定されるオブジェクト数を定義します。スライダの中間の値でトレーニングが実行されることを防ぐため、スライダを使用する代わりに、値を直接入力することをお勧めします。
位置基準の定義
- モード「参照位置」でトレーニング画像に変更して、基準オブジェクトが予想される基準位置をそれぞれ定義します。このツールは、基準オブジェクトに適合するトレーニング画像に想定されるオブジェクトをハイライトします。
- トレーニング画像で、トレーニングオブジェクトがすべて正しい位置に見つかるかどうかをチェックします。
- 見つからない場合は、オブジェクトが想定される画像部分に ROI を描画して、ROI 領域に検索領域を限定します。これらの ROI の使用目的は検索範囲の限定であり、基準位置そのものの定義には使用できません。見つかった基準オブジェクトの正しい位置は、点 ROI として内部保存されます。Ctrl ボタンを使用して、期待される参照位置の数と一致するまで複数の ROI を描画します。
オブジェクトモデルの基準位置を前のツールで使用できる場合、代わりに既知の位置データを使用し、前のツールのそれぞれの ROI 結果をパラメーター「参照位置」に接続します。詳細については、パラメーター 参照位置 の解説を参照してください。
検索パラメーターの調整
- 処理画像をクリックします。
- トレーニングに従って、ツールボード の左側の検索パラメーターを調整します。これらは、アプリケーションの画像に依存しており、自動的には調整されません。
- 一連の画像でアプリケーションを実行してトレーニングの現在の設定と検索パラメーターが適切であるかどうかを確認します。有無チェックがトレーニングマッチングモデルで正しく機能するかどうかを画像で確認します。
- 必要に応じて、パラメーターをさらに調整します。
エリアの制約
一部が画像から外れているオブジェクトは処理対象になりません。
パラメーター
パラメーター「マッチング手法トレーニング」で選択したトレーニング方法によっては、コネクターの一部がグレイ表示になります。現在選択されているトレーニング方法には適用されないため効果がないということです。
基本パラメーター
画像:
このパラメーターは、このツールに使用する入力画像です。それはマッチングモデルを決定するトレーニング画像や トレーニングされたデータをテストする処理画像としても使えます。
色画像をこのツールの入力として使用すると、最初のチャンネル (赤いチャンネル) のみが処理の対象になります。
最長距離:
このパラメーターは、オブジェクトの位置とトレーニングした基準位置との違いの許容差を定義します。このパラメーターはピクセル単位で定義され、デフォルト設定値は 5 ピクセルです。したがって、トレーニングした位置に対するチェックするオブジェクトの位置の許容誤差は、最大 5 ピクセルになります。検索の許容誤差に合わせて、対応するパラメーターで「最長距離」の値を 0 ピクセルから 100 ピクセルの範囲の値に変更できます。「キャリブレーションデータ」が利用可能で処理に使用されている場合、「最長距離」は、0 ピクセルから 100 ピクセルの範囲のキャリブレーションした距離として表示されます。画像におけるオブジェクトの位置のずれの許容誤差がわかっている場合、それに応じて「最長距離」を調整できます。
最小スコア:
このパラメーターは、マッチングの実行精度を定義します。このパラメーターはモデルの検索に使用し、マッチングオブジェクトの検出時に、トレーニング済みモデルをどの程度可視化しなければならないかを決定します。デフォルト設定値は 0.5 です。これは、画像でモデルの半分が隠れることを意味します。対応するコネクターでその値を変更できます。 値は、0.1 から 1 の範囲の数に設定することができます。「最小スコア」が大きいほど、高速で検索できます。画像でモデルが隠れるおそれがなければ、「最小スコア」に 0.8 または 0.9 など、値を大きく設定できます。それ以外は、このパラメーターの値は低く設定して、トレーニングしたモデルの大きな部分を隠して画像でマッチを検索します。
検索速度を上げるには、収縮された画像のいわゆるピラミッドを使用します。マッチングには、認識されるすべてのレベルで十分な大きさのスコアが必要です。そのため、オリジナル画像のスコアが最低スコアよりも大きくても、収縮レベルが高いと十分に認識されないためにマッチングが除外されるおそれがあります。これらのマッチングの欠損は、最低スコアを下げると見つかることがあります。
アプリケーションを段階的に実行し、すべての画像内でオブジェクトの有無が正しくチェックされているかを確認すれば現在の「最小スコア」をテストできます。
追加パラメーター
参照位置:
このパラメーターはオブジェクトが想定される基準位置を定義します。このパラメーターは、予想基準位置が既知か、前のツールで確定している場合に使用できます。このデータを再利用して、前のツールの各 ROI 結果をこのパラメーターに接続することができます。そのため、転送されるデータは、トレーニングのオブジェクトモデルの基準位置の定義に使用されます。位置は、点 ROI として指定してください。そのため、前のツールから接続される使用可能な位置が点 ROI で返ることを確認してください。デフォルトで、このパラメーターに基準位置は定義されません。
前のツールのの基準位置を使用できない場合、トレーニングパラメーターの設定の節にあるように、モード「参照位置」でトレーニング画像内のオブジェクトの予想位置を決定できます。ただし、有効な位置データがパラメーター「参照位置」に転送されると、トレーニング画像で決定した基準位置候補よりも優先して処理されます。
キャリブレーションデータ:
このパラメータでは、レンズの歪みの補正と画像平面を基準にしたカメラの位置の補正に必要なキャリブレーションデータを定義します。デフォルトで、キャリブレーションデータは定義されません。キャリブレーションデータを使用するには、キャリブレーションデータがこのツールに送信されるよう、このパラメータを カメラキャリブレーション など、前のツールの適切な結果に接続します。結果は直ちに画像に適用されます。
このツールで「キャリブレーションデータ」を使用する場合、ピクセル値を表すすべての結果は、対応するワールド座標に自動的に変換されます。
アライメントデータ:
このパラメータは、ROI のアライメントに使用するアライメントデータを表します。デフォルトでは、アライメントデータが接続されていないため、効果はありません。特定のアライメントデータを使用するには、マッチングによるアライメント、直線境界でアライメントを決定、画像をアライメント、あるいは 画像を回転 など、パラメータを適切な前のツールの結果に接続します。
失敗した処理:
このパラメーターは、定義した基準位置にオブジェクトが見つからなかった場合に、結果「絶対距離」と「相対距離」で返る値を定義します。パラメーターの設定値はデフォルトで「無視」です。 このパラメータは対応するコネクターで以下の値に設定できます。
|
値 |
説明 |
|---|---|
|
無視 |
オブジェクトが見つからなかった場合に値は返りません。 |
|
-1 |
見つからなかったオブジェクトごとに -1 が返ります。 この値は、返す任意の数字や文字列を、コネクターの入力フィールドに直接置き換えることができます。 |
|
* |
見つからなかったオブジェクトごとに * が返ります。 この値は、返す任意の数字や文字列を、コネクターの入力フィールドに直接置き換えることができます。 |
変形許容範囲:
このパラメーターは、オブジェクトの最大変形許容範囲を設定します。このパラメータはピクセル単位で定義され、デフォルト設定値は 1 ピクセルです。その場合、トレーニング済みモデルの基準オブジェクトの形状に対して、変形度が最大 1 ピクセルまでのオブジェクトが検出対象になります。値を手動で入力する場合、対応するコネクターのスライダを使用して、0 から 10 px 以上の範囲でその値を変更できます。値を 0 に設定すると、変形のないオブジェクトのみが検索対象になります。しかし、特に微細な構造を持つオブジェクトでは、「変形許容範囲」が大きいほど、誤ったオブジェクトが検索されるリスクが高くなります。そのため、「変形許容範囲」には可能な限り小さく、必要最小限の大きさの値を選択する必要があります。オブジェクトが画像でどの程度変形するか予想できる場合、それに応じて「変形許容範囲」の値を調整できます。「マッチング手法トレーニング」が「形状ベース」に設定されている場合、「変形許容範囲」のみが有効です。
最大オーバーラップ:
このパラメータは検索するオブジェクトの最大許容オーバーラップを定義します。現在のオーバーラップの許容値を定義します。オーバーラップは、オブジェクトそのものの領域ではなく、オブジェクト周囲の最小外接矩形で決定します。したがって、2 つのオブジェクトの実際の領域は交差していなくてもそれらのオブジェクトが重複することもあります。
この「最大オーバーラップ」はパーセント値で表され、デフォルト設定値は 30% です。このとき、有無チェックの対象になる検索画像における最大許容閉塞面積は、オブジェクトの最小周囲矩形の 30% です。30% を超える面積が塞がれているオブジェクトは検索できません。対応するコネクターで、この値は 0 から 100 の範囲で変更できます。値を 0 に設定すると、重複のないオブジェクトのみが検出されます。ただし、「最大オーバーラップ」が高ければ高いほど、誤ったオブジェクトが検索されるリスクが高くなります。
トレーニングパラメーター
トレーニングパラメーターは、トレーニングにのみ適用され、ツールの実行中は変更できません。ツールの適用時に使用する対応するパラメーターと区別するため、トレーニングパラメーターには、名前に接尾辞として「‑‑‑Train」が付きます。
基本トレーニングパラメーター
参照位置の数トレーニング:
このトレーニングパラメーターはオブジェクトが理想的なケースで予測される参照位置の数を定義します。すなわち、予想されるオブジェクト数がこれで定義されます。パラメーターの設定値はデフォルトで 1 です。 その場合、基準オブジェクトの 1 つの基準位置のみがトレーニングされ、処理画像ではオブジェクトが 1 つだけ検索されます。この数は、対応するコネクターで手動で調整する必要があります。参照位置の数は、最大 100 まで設定できます。この値を調整すると、対応するオブジェクトは「参照位置」モードにより、トレーニング画像内でただちに視覚化されます。スライダの中間の値でトレーニングが実行されることを防ぐため、スライダを使用する代わりに、キーボードを使用して値を直接入力することをお勧めします。
マッチング手法トレーニング:
このトレーニングパラメーターは、チェックに使用したマッチング手法を定義します。パラメーターの設定値はデフォルトで「形状ベース」です。 対応するコネクターで「マッチング手法トレーニング」を変更できます。
|
値 |
説明 |
|---|---|
|
形状ベース |
このマッチング手法では、輪郭の形状ごとにトレーニング済みモデルの基準オブジェクトを説明します。 画像の中で形状モデルのベストマッチを発見するマッチング手法によりオブジェクトの有無を確認する場合はこの手法を使います。 |
|
相関関係ベース |
このマッチング手法では、含まれるピクセルのグレイ値関係によってトレーニング済みモデルの基準オブジェクトを説明します。 オブジェクトまたはパターンのマッチングに正規化相互相関 (NCC) を使用するマッチング手法を使用して オブジェクトの存在を確認するには、この手法を使用します。 |
追加トレーニングパラメーター
追加トレーニングパラメーターは、関連するマッチング手法別にリストされます。他の手法のパラメーターは、設定できますが、得られるトレーニングモデルには反映されません。
このパラメーターは、マッチングの実行精度を定義します。このパラメーターはモデルの検索に使用し、マッチングオブジェクトの検出時に、トレーニング済みモデルをどの程度可視化しなければならないかを決定します。デフォルト設定値は 0.5 です。これは、画像でモデルの半分が隠れることを意味します。対応するコネクターでその値を変更できます。 値は、0.1 から 1 の範囲の数に設定することができます。「最小スコア」が大きいほど、高速で検索できます。画像でモデルが隠れるおそれがなければ、「最小スコア」に 0.8 または 0.9 など、値を大きく設定できます。それ以外は、このパラメーターの値は低く設定して、トレーニングしたモデルの大きな部分を隠して画像でマッチを検索します。
検索速度を上げるには、収縮された画像のいわゆるピラミッドを使用します。マッチングには、認識されるすべてのレベルで十分な大きさのスコアが必要です。そのため、オリジナル画像のスコアが最低スコアよりも大きくても、収縮レベルが高いと十分に認識されないためにマッチングが除外されるおそれがあります。これらのマッチングの欠損は、最低スコアを下げると見つかることがあります。
アプリケーションを段階的に実行し、すべての画像内でオブジェクトの有無が正しくチェックされているかを確認すれば現在の「最小スコア」をテストできます。
このパラメータは、基準オブジェクトがオブジェクトモデルと異なるときの回転の許容値を設定します。基準オブジェクトの検索および決定に使用されます。幅は度数で定義され、デフォルト設定値は 5°です。対応するコネクターで、「方向許容範囲」を 0° から 180° の範囲の角度に変更できます。基準画像でオブジェクトが表示される回転範囲がわかっている場合、それに応じて「方向許容範囲」の値を調整できます。
このパラメーターは、検索中に使用されるピラミッドレベルの数を設定します。パラメーターの設定値はデフォルトで「自動」です。 対応するコネクターで、この値を 2 から 100 のレベルに変更することができます。オブジェクトを検索する時間短縮のために、このトレーニングパラメーターは、できるだけ大きく設定してください。ただし、大きすぎても、モデルを認識できなくなるおそれがあります。結論として、トレーニングパラメーターは、認識できる程度には小さく設定してください。
形状モデルのインスタンスがひとつ以上見つかる最高のピラミッドレベル、すなわち適切なピラミッドレベルの選択は、モデルおよび入力画像によって左右されます。適切な「ピラミッドレベルの最大値」は、画像によって異なる場合があります。画像の焦点が合っていない、変形している、ノイズが多いなど、入力画像の画質が悪いと、エッジが失われたり変形するおそれがあり、デフォルト設定ではモデルのインスタンスが見つからないことがあります。その場合は、「ピラミッドレベルの最大値」の値を下げてください。
「ピラミッドレベルの最大値」パラメーターの設定値が小さすぎると、モデルの検索に時間がかかり、MERLIC の処理速度が極端に低下するおそれがあります。「マッチング手法」を「相関関係ベース」に設定して、サイズの大きい画像を使用した場合は、特に注意してください。その場合は、「ピラミッドレベルの最大値」の値を増やしてください。
このパラメータは検索するオブジェクトの最大許容オーバーラップを定義します。現在のオーバーラップの許容値を定義します。オーバーラップは、オブジェクトそのものの領域ではなく、オブジェクト周囲の最小外接矩形で決定します。したがって、2 つのオブジェクトの実際の領域は交差していなくてもそれらのオブジェクトが重複することもあります。
この「最大オーバーラップ」はパーセント値で表され、デフォルト設定値は 30% です。このとき、有無チェックの対象になる検索画像における最大許容閉塞面積は、オブジェクトの最小周囲矩形の 30% です。30% を超える面積が塞がれているオブジェクトは検索できません。対応するコネクターで、この値は 0 から 100 の範囲で変更できます。値を 0 に設定すると、重複のないオブジェクトのみが検出されます。ただし、「最大オーバーラップ」が高ければ高いほど、誤ったオブジェクトが検索されるリスクが高くなります。
このトレーニングパラメーターは、使用されるモデルのエッジコントラストを設定します。これはグレイ値で定義され、デフォルト設定値は 10 です。つまり、グレイ値が 11 以上のコントラストを持つオブジェクトが検出されます。エッジコントラストは、いくつかの方法で設定できます。
- easyTouch を使用して自動的に
easyTouch を使用して、トレーニング画像のオブジェクトを選択します。easyTouch 選択に応じて、パラメーター値が自動的に調整されます。
- 手動
対応するコネクターでの目的のエッジコントラストを手動で設定し、基準オブジェクトを検索するトレーニング画像の各部分にモデル RIO を描画します。スライダを使用するか、テキストフィールドに 1 ~ 1 000 000 000 の範囲の値を入力して値を設定できます。定義済みのエッジコントラストに一致する、可能性のあるすべてのオブジェクトが検出されます。トレーニングの基準としてオブジェクトをさらに追加する場合、画像にモデル ROI を手動で描画する必要があります。easyTouch を使用してオブジェクトを選択する場合、パラメーター値は自動的に調整され、以前に定義した設定が失われます。
このトレーニングパラメーターは、トレーニング画像でオブジェクトの検索に使用するエッジコントラストを定義します。これはグレイ値で定義され、デフォルト設定値は 5 です。つまり、グレイ値が 6 以上のコントラストを持つオブジェクトが検出されます。エッジコントラストは、いくつかの方法で設定できます。
- easyTouch を使用して自動的に
easyTouch を使用して、トレーニング画像のオブジェクトを選択します。easyTouch 選択に応じて、パラメーター値が自動的に調整されます。
- 手動
対応するコネクターでの目的のエッジコントラストを手動で設定し、定義済みのコントラストでエッジを決定するトレーニング画像の各部分にモデル ROI を描画します。スライダを使用するか、テキストフィールドに 1 ~ 1 000 000 000 の範囲の値を入力して値を設定できます。定義済みのエッジコントラストに一致する、可能性のあるすべてのオブジェクトが検出されます。トレーニングの基準としてオブジェクトをさらに追加する場合、画像にモデル ROI を手動で描画する必要があります。easyTouch を使用してオブジェクトを選択する場合、パラメーター値は自動的に調整され、以前に定義した設定が失われます。
このパラメーターは、オブジェクトの最大変形許容範囲を設定します。このパラメータはピクセル単位で定義され、デフォルト設定値は 1 ピクセルです。その場合、トレーニング済みモデルの基準オブジェクトの形状に対して、変形度が最大 1 ピクセルまでのオブジェクトが検出対象になります。値を手動で入力する場合、対応するコネクターのスライダを使用して、0 から 10 px 以上の範囲でその値を変更できます。値を 0 に設定すると、変形のないオブジェクトのみが検索対象になります。しかし、特に微細な構造を持つオブジェクトでは、「変形許容範囲」が大きいほど、誤ったオブジェクトが検索されるリスクが高くなります。そのため、「変形許容範囲」には可能な限り小さく、必要最小限の大きさの値を選択する必要があります。オブジェクトが画像でどの程度変形するか予想できる場合、それに応じて「変形許容範囲」の値を調整できます。「マッチング手法トレーニング」が「形状ベース」に設定されている場合、「変形許容範囲」のみが有効です。
このパラメーターは、画像内でモデルが認識される条件を決定します。このパラメーターのデフォルト設定値は「極性を使用」です。
|
値 |
説明 |
|---|---|
|
極性を使用 |
この極性尺度を使用する場合、トレーニング画像および処理画像内のオブジェクトのコントラストが同じでなければなりません。たとえば、モデルが暗い背景上の明るいオブジェクトの場合、背景よりも明るい場合にのみオブジェクトが検出されます。 この尺度は、単一チャンネル画像にのみ適用できます。トレーニング画像または処理画像として複数チャンネル画像を使用する場合、最初のチャンネルのみが使用されます。 |
|
色極性を無視 |
この極性尺度を使用する場合、色のコントラストが局所的に変化している場合でもモデルが検出されます。たとえば、オブジェクトの一部で色が緑から赤に変化している場合でも検出されます。このモードは、オブジェクトが表示されるチャンネルが事前に分からない場合に有用です。ただし、この極性尺度を使用する場合、処理モードの実行時間が若干長くなります。 この尺度は、任意の数のチャンネルを持つ画像に使用できます。単一チャンネルの画像に使用した場合、「ローカル極性を無視」と同じ効果があります。トレーニングモデルの作成および検索では、異なるチャンネル数を使用できます。これは、合成により生成された単一チャンネル画像からモデルを作成する場合に使用できます。さらに、チャンネルには、RGB 画像のように、光の分解スペクトルを含める必要はありません。各チャンネルには、異なる方向からオブジェクトを照らすことによって得られる、同一オブジェクトの複数の画像を含めることができます。 |
|
グローバル極性を無視 |
この極性尺度を使用する場合、コントラストがグローバルに反転している場合でもモデルが検出されます。たとえば、モデルが暗い背景上の明るいオブジェクトの場合、背景予備も明るいオブジェクトだけではなく(「極性を使用」と同様)、背景よりも暗いオブジェクトも検出されます。この場合、処理モードの実行時間が若干長くなります。 この尺度は、単一チャンネル画像にのみ適用できます。トレーニング画像または処理画像として複数チャンネル画像を使用する場合、最初のチャンネルのみが使用されます。 |
|
ローカル極性を無視 |
この極性尺度を使用する場合、コントラストが局所的に変化している場合でもモデルが検出されます。これは、オブジェクトにグレイ値が中程度の部分があり、その中に周囲よりも暗いかまたは明るいサブオブジェクトがある場合に有用です。ただし、この極性尺度を使用する場合、処理モードの実行時間が若干長くなります。 この尺度は、単一チャンネル画像にのみ適用できます。トレーニング画像または処理画像として複数チャンネル画像を使用する場合、最初のチャンネルのみが使用されます。 |
このパラメーターは、マッチングの実行精度を定義します。このパラメーターはモデルの検索に使用し、マッチングオブジェクトの検出時に、トレーニング済みモデルをどの程度可視化しなければならないかを決定します。デフォルト設定値は 0.5 です。これは、画像でモデルの半分が隠れることを意味します。対応するコネクターでその値を変更できます。 値は、0.1 から 1 の範囲の数に設定することができます。「最小スコア」が大きいほど、高速で検索できます。画像でモデルが隠れるおそれがなければ、「最小スコア」に 0.8 または 0.9 など、値を大きく設定できます。それ以外は、このパラメーターの値は低く設定して、トレーニングしたモデルの大きな部分を隠して画像でマッチを検索します。
検索速度を上げるには、収縮された画像のいわゆるピラミッドを使用します。マッチングには、認識されるすべてのレベルで十分な大きさのスコアが必要です。そのため、オリジナル画像のスコアが最低スコアよりも大きくても、収縮レベルが高いと十分に認識されないためにマッチングが除外されるおそれがあります。これらのマッチングの欠損は、最低スコアを下げると見つかることがあります。
アプリケーションを段階的に実行し、すべての画像内でオブジェクトの有無が正しくチェックされているかを確認すれば現在の「最小スコア」をテストできます。
このパラメータは、基準オブジェクトがオブジェクトモデルと異なるときの回転の許容値を設定します。基準オブジェクトの検索および決定に使用されます。幅は度数で定義され、デフォルト設定値は 5°です。対応するコネクターで、「方向許容範囲」を 0° から 180° の範囲の角度に変更できます。基準画像でオブジェクトが表示される回転範囲がわかっている場合、それに応じて「方向許容範囲」の値を調整できます。
このパラメーターは、検索中に使用されるピラミッドレベルの数を設定します。パラメーターの設定値はデフォルトで「自動」です。 対応するコネクターで、この値を 2 から 100 のレベルに変更することができます。オブジェクトを検索する時間短縮のために、このトレーニングパラメーターは、できるだけ大きく設定してください。ただし、大きすぎても、モデルを認識できなくなるおそれがあります。結論として、トレーニングパラメーターは、認識できる程度には小さく設定してください。
形状モデルのインスタンスがひとつ以上見つかる最高のピラミッドレベル、すなわち適切なピラミッドレベルの選択は、モデルおよび入力画像によって左右されます。適切な「ピラミッドレベルの最大値」は、画像によって異なる場合があります。画像の焦点が合っていない、変形している、ノイズが多いなど、入力画像の画質が悪いと、エッジが失われたり変形するおそれがあり、デフォルト設定ではモデルのインスタンスが見つからないことがあります。その場合は、「ピラミッドレベルの最大値」の値を下げてください。
「ピラミッドレベルの最大値」パラメーターの設定値が小さすぎると、モデルの検索に時間がかかり、MERLIC の処理速度が極端に低下するおそれがあります。「マッチング手法」を「相関関係ベース」に設定して、サイズの大きい画像を使用した場合は、特に注意してください。その場合は、「ピラミッドレベルの最大値」の値を増やしてください。
このパラメータは検索するオブジェクトの最大許容オーバーラップを定義します。現在のオーバーラップの許容値を定義します。オーバーラップは、オブジェクトそのものの領域ではなく、オブジェクト周囲の最小外接矩形で決定します。したがって、2 つのオブジェクトの実際の領域は交差していなくてもそれらのオブジェクトが重複することもあります。
この「最大オーバーラップ」はパーセント値で表され、デフォルト設定値は 30% です。このとき、有無チェックの対象になる検索画像における最大許容閉塞面積は、オブジェクトの最小周囲矩形の 30% です。30% を超える面積が塞がれているオブジェクトは検索できません。対応するコネクターで、この値は 0 から 100 の範囲で変更できます。値を 0 に設定すると、重複のないオブジェクトのみが検出されます。ただし、「最大オーバーラップ」が高ければ高いほど、誤ったオブジェクトが検索されるリスクが高くなります。
このパラメーターは、画像内でモデルが認識される条件を決定します。このパラメーターのデフォルト設定値は「極性を使用」です。
|
値 |
説明 |
|---|---|
|
極性を使用 |
この極性尺度を使用する場合、トレーニング画像および処理画像内のオブジェクトのコントラストが同じでなければなりません。たとえば、モデルが暗い背景上の明るいオブジェクトの場合、背景よりも明るい場合にのみオブジェクトが検出されます。 この尺度は、単一チャンネル画像にのみ適用できます。トレーニング画像または処理画像として複数チャンネル画像を使用する場合、最初のチャンネルのみが使用されます。 |
|
色極性を無視 |
この極性尺度を使用する場合、色のコントラストが局所的に変化している場合でもモデルが検出されます。たとえば、オブジェクトの一部で色が緑から赤に変化している場合でも検出されます。このモードは、オブジェクトが表示されるチャンネルが事前に分からない場合に有用です。ただし、この極性尺度を使用する場合、処理モードの実行時間が若干長くなります。 この尺度は、任意の数のチャンネルを持つ画像に使用できます。単一チャンネルの画像に使用した場合、「ローカル極性を無視」と同じ効果があります。トレーニングモデルの作成および検索では、異なるチャンネル数を使用できます。これは、合成により生成された単一チャンネル画像からモデルを作成する場合に使用できます。さらに、チャンネルには、RGB 画像のように、光の分解スペクトルを含める必要はありません。各チャンネルには、異なる方向からオブジェクトを照らすことによって得られる、同一オブジェクトの複数の画像を含めることができます。 |
|
グローバル極性を無視 |
この極性尺度を使用する場合、コントラストがグローバルに反転している場合でもモデルが検出されます。たとえば、モデルが暗い背景上の明るいオブジェクトの場合、背景予備も明るいオブジェクトだけではなく(「極性を使用」と同様)、背景よりも暗いオブジェクトも検出されます。この場合、処理モードの実行時間が若干長くなります。 この尺度は、単一チャンネル画像にのみ適用できます。トレーニング画像または処理画像として複数チャンネル画像を使用する場合、最初のチャンネルのみが使用されます。 |
|
ローカル極性を無視 |
この極性尺度を使用する場合、コントラストが局所的に変化している場合でもモデルが検出されます。これは、オブジェクトにグレイ値が中程度の部分があり、その中に周囲よりも暗いかまたは明るいサブオブジェクトがある場合に有用です。ただし、この極性尺度を使用する場合、処理モードの実行時間が若干長くなります。 この尺度は、単一チャンネル画像にのみ適用できます。トレーニング画像または処理画像として複数チャンネル画像を使用する場合、最初のチャンネルのみが使用されます。 |
結果
基本結果
受け入れられたオブジェクト:
この結果では、個々のオブジェクトが想定した位置に見つかったかどうかを示すブール値のタプルが返ります。正しい位置にオブジェクトがあれば、そのオブジェクトにはブール値 1 が返ります。オブジェクトが見つからず、想定した位置にない場合、このオブジェクトにはブール値 0 が返ります。すべてのオブジェクトの検索値はタプルで返ります。
すべてのオブジェクトを受け入れ:
この結果では、想定した位置にすべてのオブジェクトが見つかったかどうかを示すブール 値が返ります。正しい位置にすべてのオブジェクトがあれば、ブール値 1 が返ります。その位置に少なくともそのオブジェクトの 1 つがない場合、ブール値 0 が返ります。
絶対距離:
この結果では、想定した位置で見つかった各オブジェクトからの距離が返ります。見つかったオブジェクトの実際の位置は、トレーニングした基準位置とは異なる場合があります。そのため、「絶対距離」には、トレーニングした基準と見つかった位置の間の実際の距離が含まれます。これらの距離は、実数としてタプルで返ります。オブジェクトが画像に見つからない場合、このオブジェクトには、「測定に失敗」に定義した値が返ります。「キャリブレーションデータ」を使用でき、それを処理に使用する場合、キャリブレーションした距離として「絶対距離」が返ります。
相対距離:
この結果では、予測された位置で見つかった各オブジェクトからの相対距離が返ります。見つかったオブジェクトの実際の位置は、トレーニングした基準位置とは異なる場合があります。そのため、「相対距離」は、「絶対距離」から定義された「最長距離」までの相対値を返します。たとえば、「絶対距離」が 20 で「最長距離」が 40 に設定されている場合、「相対距離」は 0.5 になります。これらの距離は、実数としてタプルで返ります。オブジェクトが画像に見つからない場合、このオブジェクトには、「測定に失敗」に定義した値が返ります。
ツール状態:
「ツール状態」はツール状態の情報を返します。したがって、エラー処理に使うことができます。さまざまなツールの状態結果の詳細については、 ツール状態 結果 のトピックを参照してください。
追加結果
受け入れられたオブジェクト:
この結果では、想定位置で発見されたオブジェクトの輪郭が返ります。輪郭は、'ok' に定義した色 (デフォルトで緑色) の設定で表示されます。
拒否されたオブジェクト:
この結果では、想定位置で発見されず、拒否されたオブジェクトの輪郭が返ります。これらの領域は、'不合格' に定義した色 (デフォルトで赤色) の設定で表示されます。
あいまいなオブジェクト:
この結果では、あいまいなオブジェクトの輪郭が返ります。基準位置の近くで複数のオブジェクトが見つかった場合、これらのオブジェクトは「あいまいなオブジェクト」として返されます。「最長距離」の値が大きいと、あいまいなオブジェクトになる可能性があります。
処理時間:
この結果は、ツールの直近の実行の持続時間をミリ秒単位で返します。結果は、追加結果として提供されます。したがって、デフォルトでは非表示になっていますが、ツール結果の横にある ![]() ボタンを使用して表示できます。詳細については、ツールリファレンス概要の処理時間の節を参照してください。
ボタンを使用して表示できます。詳細については、ツールリファレンス概要の処理時間の節を参照してください。
トレーニング結果
基本トレーニング結果
ピラミッドレベルの最大値使用済み:
この結果では、前回実行したトレーニングで使用した「ピラミッドレベルの最大値トレーニング」が返ります。
追加トレーニング結果
参照位置外れ:
このパラメーターは、前回実行したトレーニングで使用された基準位置を定義します。
アプリケーションの例
このツール、以下の MERLIC Vision App 例で使用します:
- check_bent_leads.mvapp

