スピードアップのヒント
このトピックで説明する推奨事項に従って、MERLIC の処理時間を最適化できます。セットアップを最適化すると、MERLIC および特定の MVApps の読み込み時間が短縮される他、ツールの実行時間も短縮されます。
システム要件および構成
トピック「サポートしているプラットフォームとシステム要件」で説明されているように、システムが MERLIC を使用するためのすべての要件を満たしていることを確認します。さらに、更新、ウイルススキャンなど、コンピュータ上で実行されている他のプロセスによって MERLIC が妨害されていないことを確認します。
MVApp の構築にな関する一般的なヒント
以下のセクションには、さまざまな程度でシステムリソースの使用状況に影響を与える MERLIC のプロセスに関する情報が記載されています。これらの情報を活用して、MERLIC のスピードアップに役立つソフトウェアアーキテクチャの機能を実装できます。多くの場合、計算のスピードとロバスト性にはトレードオフがあり、複数の要素の影響を受けます。
画像およびカメラの使用の最適化
- 可能な場合、アプリケーションに適した解像度およびサイズの画像を使用します。画像は必要十分なサイズにします。
- 目的に適したファイル形式を選択します。通常、ima および jpeg 20 の読み込みおよび書き込みが最も高速です。
- カメラに適した視野および焦点を選択し、画像サイズを最小化します。また、ツール 画像を切り抜く を使用して、後続のツール用の画像サイズを縮小できます。
- 可能な場合、画像をアライメント を使用して画像全体のアライメントを調整するのではなく、ROI を使用してアライメントを調整します。
- キャリブレーション値がすでに使用可能な場合、ツール カメラキャリブレーション でパラメーター カメラセットアップモード を「0」に設定します。
記録
ログファイルの数とサイズを合理的な値に設定します。ログファイルの数が非常に多いと、MERLIC の起動が遅くなる場合があります。詳細については、トピック「記録」を参照してください。
並列処理の使用
可能な場合、並列処理を利用する MVApps を構築します。詳細については、トピック「並列処理」を参照してください。
MVApps およびツールの構成
以下のトピックには、ツール構成および最適か可能なパラメーターに関する情報が記載されています。
- 必要な数のツールのみを使用することをお勧めします。MERLIC Vision App で中間処理または前処理ステップを実行するツールを確認し、別の方法またはより少ないツールで実現可能か検討します。
MERLIC Vision App の例 read_lot_number_and_ECC200.mvapp では、画像のアライメントにアライメントツールは使用されていません。代わりに、若干ずれのある画像の処理が可能なツール テキストや数字の読み取り が使用されています。
- ほとんどのツールでは、パラメーター ROI またはさまざまな種類の ROI を使用して、処理または検索領域を定義できます。個別のツールおよび MVApp 全体で、ROI および検索 ROI の数およびサイズを最小化します。ツールで easyTouch が使用可能な場合、選択についての視覚的フィードバックが提供され、適切な領域を見つけやすくなります。
- 画像上ではなく、ROI 上でアライメントデータを使用する方が効果的です。Aztec コードの読み取り など、ほとんどのツールでは、アライメントデータはデフォルトで ROI に適用されます。
ツール
直線境界でアライメントを決定
トレーニングパラメーター「最小エッジ完全性トレーニング」の値を可能な限り高く設定します。
パラメーターの詳細については、直線境界でアライメントを決定 のツールリファレンスを参照してください。
グレイ値特徴による有り無し検査
- パラメーター「受け入れしきい値」の値を必要最低限に設定します。
- 新しいトレーニングを使用してトレーニング特徴を自動的に決定する必要がない場合、パラメーター「特徴を更新」の値を「0」に設定します。
- トレーニングパラメーター「最長距離」の値を可能な限り短く設定します。
- 処理済み画像とトレーニング済みモデルでモデルのサイズが同じ場合、パラメーター「サイズ許容範囲」の値を「0」に設定します。
パラメーターの詳細については、グレイ値特徴による有り無し検査 のツールリファレンスを参照してください。
カテゴリ読み込みのツール
- パラメーター「コードの予想数」の値を、画像に表示されるコードの数と正確に同じに設定し、読み取る必要があるコードを含む画像のみを使用します。
- 通常よりも高さまたは幅の大きなコードについては、「最小バーコード高さ」などの最小および最大高さまたは幅のパラメーター値を手動で設定します。
- 「要素幅許容範囲」、「コントラスト許容範囲」または「スタートストップ許容範囲」などの許容範囲のパラメーター値は、必要十分な高さに設定します。
- パラメーター「ミラーリングコード」の値を「no」に設定します。
- パラメーター「小モジュールに対してロバスト」の値を「0」に設定します。
パラメーターについて詳しくは、 読み取り のトピックを参照してください。
ツールパラメーター
ピラミッドレベルの最大値トレーニング
一致するオブジェクトを検索するツールを使用する場合、ツールパラメーター「ピラミッドレベルの最大値トレーニング」では、最も深い検索レベルを定義します。設定値が小さすぎると、モデルの検索に時間がかかる場合があります。サイズの大きい画像を使用した場合は、特に気を付けてください。この場合、ツールパラメーター「ピラミッドレベルの最大値トレーニング」の値を、モデルが検出される範囲でできるだけ大きくすることをお勧めします。
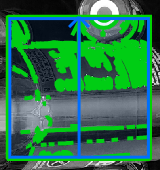
パラメーター「ピラミッドレベルの最大値トレーニング」の値に「3」を使用した、ツール マッチングによるアライメント でのトレーニングの成功例:
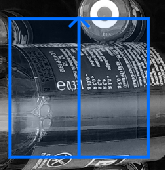
パラメーター「ピラミッドレベルの最大値トレーニング」の値に「4」を使用した、ツール マッチングによるアライメント でのトレーニングの失敗例:
最小スコア
一致するオブジェクトを検索するツールを使用する場合、ツールパラメーター「最小スコア」では、マッチングの実行精度を定義します。ツールパラメーター「最小スコア」の値を可能な限り高く設定します。画像でモデルが隠れるおそれがなければ、ツールパラメーター「最小スコア」に「0.8」または「0.9」など、大きな値を設定できます。
変形許容範囲
一致するオブジェクトを検索するツールを使用する場合、ツールパラメーター「変形許容範囲」では、MERLIC が変形したオブジェクトを検索する必要があるかどうかを定義します。ツールパラメーター「変形許容範囲」の値を可能な限り小さく設定します。
方向許容範囲
一致するオブジェクトを検索するツールを使用する場合、ツールパラメーター「方向許容範囲」では、MERLIC が回転したオブジェクトを検索する必要があるかどうかを定義します。ツールパラメーター「方向許容範囲」の値を、画像内で最大の向きのずれと同程度の高さに設定します。
タイムアウト 持続時間
絶対に必要な場合にのみ、読み取りツールでツールパラメーター「タイムアウト」を使用して、ツールの実行を中断します。トレーニングモードではタイムアウトが無視されます。
最大オーバーラップ
一致するオブジェクトを検索するツールを使用する場合、重なっているオブジェクトがない画像を使用します。ツールパラメーター「最大オーバーラップ」の値を必要十分な高さに設定します。値を「0」に設定すると、重複のないオブジェクトのみが検出されます。
オブジェクトの最大数
一致するオブジェクトを検索するツールを使用する場合、ツールパラメーター「オブジェクトの最大数」の値を可能な限り低く設定します。オブジェクト数がデフォルト値を超えた場合、ツールパラメーター「最小スコア」の値を上回る最良のオブジェクトのみが返されます。
処理領域
ツールパラメーター「処理領域」の値を必要十分な大きさに設定します。処理された領域は ROI の影響も受けることがあります。
ウィジェット
表
最適なパフォーマンスを確保するため、必要なすべてのデータを表示するために必要十分な大きさの「列数」または「行数」を追加します。
INI ファイル用の高度なオプション
プロパティ「CycleTime」に可能な限り高い値を、プロパティ「ReconnectInterval」に可能な限り低い値を設定します。詳細については、トピック「MERLIC INI ファイル」を参照してください。

