エッジのペアを計測
このツールでは、向かい合ったエッジペアを計測します。
このツールは、平行ではないエッジペアも計測されるため、ラインの長さまたは不規則な形状の厚さなど、あらゆる種類の計測に使用できます。
このツールには easyTouch および easyTouch+ を利用することができます。 したがって、画像では計測するエッジ線分を対話的に選択できるのにタイし、対応するパラメーターは自動的に適用されます。計測するエッジの 1 本にマウスカーソルを合わせます。MERLIC には、提案されたエッジペアのプレビューが表示されます。マウスポインタの位置で、対応する対向エッジの検索動作に影響が生じ、マウスポインタがどちら側にあるかによって対向エッジは決まります。MERLIC はマウスがある側で対向エッジを検索します。したがって、マウスを一方の側からもう一方の側に移動すると、提案されるエッジペアのプレビューが変化します。プレビューに問題がなければ、エッジをクリックして選択を確定します。このパラメーターは、選択したエッジペアに合わせて自動的に調整されます。ただし、対応するコネクターでは、手動でも調整できます。
あるいは、関心領域 (ROI) で計測することもできます。 画像に ROI を描画します。現在のパラメーター設定を満たす可能性のあるエッジペアが ROI にある場合、そのエッジが自動的に選択されて、計測が行われます。ROI は、開始点および終了点、つまりエッジの長さも決定します。曲線上のエッジを検出するには、小さな ROI を使用します。
パラメーター
基本パラメーター
画像:
このパラメーターは、エッジペアを計測する入力画像を表します。
色画像をこのツールの入力として使用すると、最初のチャンネル (赤いチャンネル) のみが処理の対象になります。
エッジコントラスト:
このパラメーターは、背景を基準にしたエッジのコントラストを定義します。このパラメーターはグレイ値として定義され、デフォルト設定値は 10 です。 計測用にエッジペアを選択すると、そのエッジの「エッジコントラスト」が直ちに設定され、使用されます。easyTouch+ でさらにエッジペアを追加すると、選択対象に追加された各エッジペアで「エッジコントラスト」が自動的に調整されます。しかし、対応するコネクターで値を手動で変更することもできます。
エッジ幅:
このパラメーターは、エッジの幅を定義します。このパラメーターはピクセル単位で定義され、デフォルト設定値は 2 ピクセルです。計測用にエッジペアを選択すると、対応する「エッジ幅」が直ちに設定され、使用されます。easyTouch+ でさらにエッジペアを追加すると、選択対象に追加された各エッジペアで「エッジ幅」が自動的に調整されます。しかし、対応するコネクターで値を手動で変更することもできます。
エッジ推移:
このパラメーターで、エッジの推移プロパティを定義します。推移は、外側から内側に決まります。パラメーターの設定値はデフォルトで「明から暗へ」です。
easyTouch による測定用にエッジペアを選択すると、パラメーター値が直ちに設定され、選択対象に追加された各エッジペアごとに自動的に調整されます。選択したエッジペア間のエリアのグレイ値がエッジペアの外側よりも小さい場合、「エッジ推移」は「明から暗へ」として確定します。反対に、エッジペア間のグレイ値の方が大きい場合、「エッジ推移」は「暗から明へ」として確定します。
計測に ROI を使用する場合、反対側のエッジペアは、その ROI 内で検索し、エッジは、「エッジ推移」の指定値に従って選択されます。ちなみに、エッジは、ROI の方向とその逆方向の 2 方向で検索します。
|
値 |
説明 |
画像例 |
|---|---|---|
|
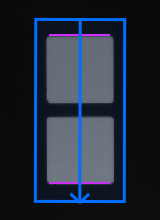
暗から明へ |
明から暗を分離する最初のエッジ (低いグレイ値から高いグレイ値) は、エッジペアに使用します。 右の画像は、パラメーターを「暗から明へ」に設定したときに ROI 内で見つかるエッジペアです。ROI の方向が上から下であるため、画像では ROI の上から下に向かってエッジの検索が行われます。 上から最初のエッジは、暗から明への遷移条件を満たしており、エッジペアに使用されます。反対側のエッジは、下から上に検索が行われます。この検索方向で、最初のエッジもエッジペアにも使用できます。これら 2 本のエッジ間のすべてのエッジは無視されます。 |
|
|
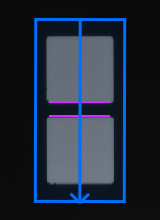
明から暗へ |
暗から明を分離する最初のエッジ (高いグレイ値から低いグレイ値) は、エッジペアに使用します。 右の画像は、パラメーターを「明から暗へ」に設定したときに ROI 内で見つかるエッジペアです。ROI の方向が上から下であるため、画像では ROI の上から下に向かってエッジの検索が行われます。 第 2 のエッジは、明から暗への遷移条件を満たす最初のエッジであり、エッジペアに使用されます。反対側のエッジは、下から上に検索が行われます。この検索方向で、第 2 のエッジは、暗から明を分離する最初のエッジなので、第 2 のエッジもエッジペアに使用されます。 |
|
|
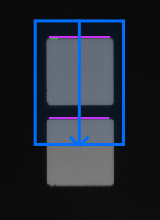
任意 |
エッジはどちらの方向 (暗から明、明から暗) にも変化する可能性があります。見つかった最初のエッジは、それらの「エッジ推移」が何であれ、反対側のエッジペアに使用されます。 右の画像は、パラメーターを「任意」に設定したときに ROI 内で見つかるエッジペアです。ROI の方向が上から下であるため、画像では一方のエッジは ROI の上から下に向かって、他方のエッジは下から上に向かって検索が行われます。 この例で、上から下の方向の検索で見つかった最初のエッジの遷移は「暗から明へ」になり、一方下から上への方向で見つかった反対側のエッジの遷移は「明から暗へ」になります。 |
|
追加パラメーター
ROI:
このパラメーターは、処理用の関心領域 (ROI) を定義します。 デフォルトで、「ROI」は空に定義されます。ROI を処理に使用する場合は、前のツールの適切な ROI 結果にパラメーターを接続するか、使用可能な ROI ボタンで新しい ROI を画像に描画します。
現在のパラメーター設定を満たす反対側のエッジ線分がないか ROI をチェックします。たとえば、「エッジ推移」を「暗から明へ」に設定すると、このツールは最初のエッジが暗から明に変化するエッジペアがないか ROI 方向に検索を行います。適切なエッジペアが見つかると、それらは計測に使用されます。
アライメントデータ:
このパラメータは、ROI のアライメントに使用するアライメントデータを表します。デフォルトでは、アライメントデータが接続されていないため、効果はありません。特定のアライメントデータを使用するには、マッチングによるアライメント、直線境界でアライメントを決定、画像をアライメント、あるいは 画像を回転 など、パラメータを適切な前のツールの結果に接続します。
キャリブレーションデータ:
このパラメータでは、レンズの歪みの補正と画像平面を基準にしたカメラの位置の補正に必要なキャリブレーションデータを定義します。デフォルトで、キャリブレーションデータは定義されません。キャリブレーションデータを使用するには、キャリブレーションデータがこのツールに送信されるよう、このパラメータを カメラキャリブレーション など、前のツールの適切な結果に接続します。結果は直ちに画像に適用されます。
このツールで「キャリブレーションデータ」を使用する場合、ピクセル値を表すすべての結果は、対応するワールド座標に自動的に変換されます。
最小エッジ完全性:
|
可視化 |
説明 |
|---|---|
|
|
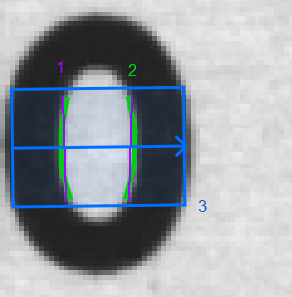
このパラメーターは、ROI (3) の内側で検出された輪郭 (2) による支持が必要なエッジ (1) の最小の断片を定義します。検出された輪郭がエッジの「最小エッジ完全性」未満を占める場合、MERLIC はそれらを確立しません。この場合、輪郭またはエッジのいずれも表示されません。「最小エッジ完全性」の決定に使用される輪郭は、ROI の内側の任意の場所で検出されます。 「最小エッジ完全性」は、0 から 1 の間の値で定義され、0% から 100% の百分率として解釈できます。デフォルト設定値は 0.4 です。適用される値は、エッジの選択時に easyTouch によって自動的に決定されます。ただし、パラメーター値は手動でも調整できます。 |
測定に失敗:
このパラメーターでは、計測を実行できない場合に、「最短距離」、「最長距離」、「平均距離」、「エッジ完全性」および「角度」の結果で返す値を指定します。パラメーターの設定値はデフォルトで「無視」です。このパラメータは対応するコネクターで以下の値に設定できます。
|
値 |
説明 |
|---|---|
|
無視 |
計測を実行できない場合、値を返しません。 |
|
-1 |
計測を実行できない場合、-1 を返します。 この値は、返す任意の数字や文字列を、コネクターの入力フィールドに直接置き換えることができます。 |
|
* |
計測を実行できない場合、* を返します。 この値は、返す任意の数字や文字列を、コネクターの入力フィールドに直接置き換えることができます。 |
結果
基本結果
線分:
この結果では、計測したエッジペアのグラフィック表示が返ります。返るのは線分 ROI です。複数のエッジ線分を計測した場合、「線分」にはすべてのエッジペアの ROI が含まれます。
平均距離:
この結果には、エッジペア間の平均距離が返ります。距離はエッジ線分に垂直に計測され、「最短距離」と「最長距離」の平均値として定義されます。結果はピクセル単位の実数で返ります。「キャリブレーションデータ」を使用すると、ワールド座標で距離が返ります。複数のエッジペアを計測すると、対応する平均距離がタプルで返ります。
角度:
この結果では、計測したエッジペア間の角度が返ります。角度は 0° から 180° の範囲の実数の度数単位で返ります。ひとつ以上のエッジペアを計測すると、対応する角度がタプルとして返ります。
ツール状態:
「ツール状態」はツール状態の情報を返します。したがって、エラー処理に使うことができます。さまざまなツールの状態結果の詳細については、 ツール状態 結果 のトピックを参照してください。
追加結果
最短距離:
この結果では、エッジペア間の最短距離が返ります。結果はピクセル単位の実数で返ります。「キャリブレーションデータ」を使用すると、ワールド座標で距離が返ります。この実数は、エッジ線分に垂直な最短距離として定義されます。複数のエッジペアを計測すると、対応する最短距離がタプルで返ります。
最長距離:
この結果では、エッジペア間の最長距離が返ります。結果はピクセル単位の実数で返ります。「キャリブレーションデータ」を使用すると、ワールド座標で距離が返ります。この実数は、エッジ線分に垂直な最長距離として定義されます。複数のエッジペアを計測すると、対応する最長距離がタプルで返ります。
エッジ完全性:
この結果では、計測したエッジペアの実際の「エッジ完全性」が返ります。返る値は 0 から 1 の範囲の実数による百分率です。 エッジの輪郭点をどれだけ計測に使用できるかどうかがこれでわかります。複数のエッジペアを計測すると、対応する「エッジ完全性」値がタプルとして返されます。
使用エッジ:
この結果では、計測に使用したエッジ線分の輪郭が返ります。特に、ROI が非常に小さい場合など、「使用エッジ」で返る輪郭は、画像の実際のエッジとは異なる場合があります。
処理時間:
この結果は、ツールの直近の実行の持続時間をミリ秒単位で返します。結果は、追加結果として提供されます。したがって、デフォルトでは非表示になっていますが、ツール結果の横にある ![]() ボタンを使用して表示できます。詳細については、ツールリファレンス概要の処理時間の節を参照してください。
ボタンを使用して表示できます。詳細については、ツールリファレンス概要の処理時間の節を参照してください。
アプリケーションの例
このツール、以下の MERLIC Vision App 例で使用します:
- measure_distance_to_center_led.mvapp

