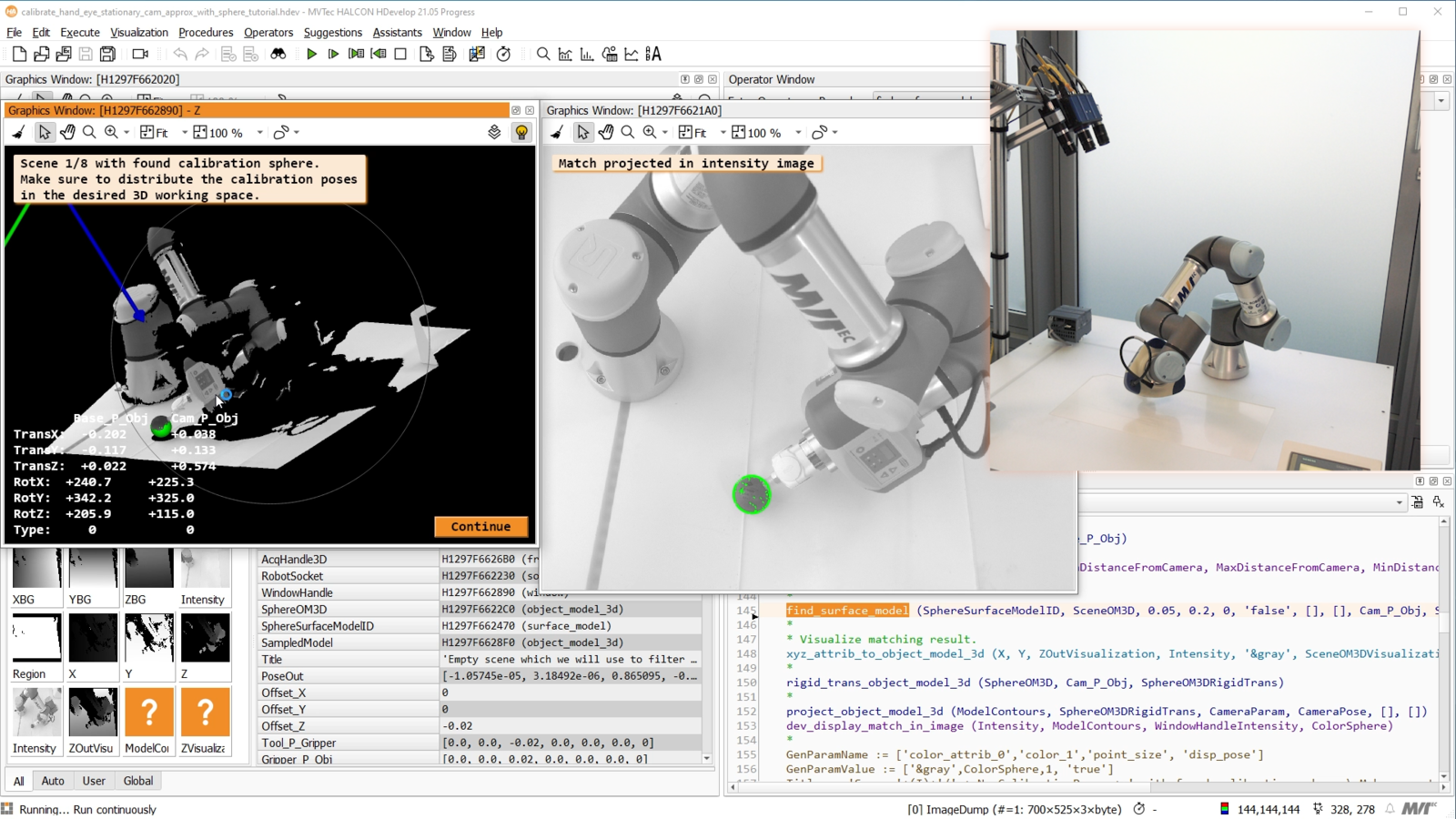
在本教程中,我们使用 HDevelop 执行快速简便的近似手眼校准。 这种手眼校准对于使用机器人拾取和放置由固定 3D 传感器观察到的物体是必要的。 有多种方法可以使用 HALCON 执行手眼校准 - 在此视频中,机器人用其抓手握住乒乓球,同时 3D 传感器获取图像数据。 有了相应的位姿,我们就可以校准从相机坐标系到机器人坐标系的转换。 我们展示了几种检查校准的方法,然后使用校准结果拾取和放置对象。

使用 MVTec HALCON(固定 3D 传感器)进行近似手眼校准
Please note: Once you watch the video, data will be transmitted to Polyv. For more information, see Polyv Privacy.