在几乎所有的机器视觉应用中,识别目标物体都是最基本的步骤之一。在图像采集完成后,接下来的核心问题通常是:图像中目标物体的准确位置在哪里?例如,当机器人要安全地抓取一个物体时,必须精确知道其位置。这一信息对于生产和装配中的许多其他任务同样至关重要。以半导体制造为例,所有微型元件的位置必须被精确定位,否则就无法进行高质量的后续加工。在饮料行业中,为了确保灌装和检测过程顺利进行,必须明确瓶子及其标签的准确位置。这只是众多应用场景中的几个典型案例。
此时,机器视觉软件的任务是从图像数据中精准提取相关信息。关键技术就在于“匹配技术”。要实现高效且可靠的匹配解决方案,需同时满足三个核心参数:执行速度、算法的稳定性以及结果的精度。这三者缺一不可,共同决定了机器视觉系统在实际应用中的性能表现。
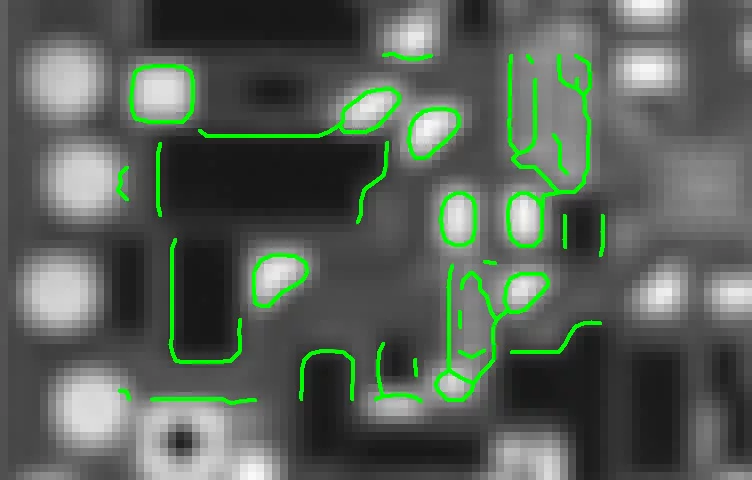
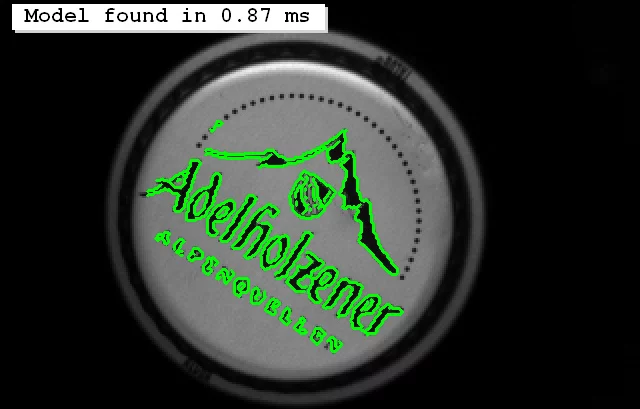
那么,这三个参数究竟意味着什么?速度方面:在许多应用中,系统处理一张图像的时间往往只有几毫秒。这对匹配算法的执行效率提出了极高要求。稳定性方面:即使图像中存在大量噪声、对比度低或存在模糊等干扰因素,系统也必须能够准确地识别物体——即便人眼在此情况下也难以辨识,软件仍需稳定运行。最后,在精准度方面:某些应用需要实现高达 1/20 像素的定位精度,以及 1/100 像素的重复性(即在像素级缺陷检测中,多次测量结果的一致性)。这类要求极高的精度对演算法设计和图像品质提出了极大挑战。
一旦性能要求得到满足,匹配技术便能够显著优化各类机器视觉应用。例如,机器人可以依赖精确的匹配结果实现微调,从而稳定地抓取物体;质量检测可由此判断组件是否完全符合技术规范。在生产流程中,匹配技术可用于精确对齐工件,以便进行后续加工操作。在测量任务中,待测物体也能被精准定位。此外,匹配还可用于定位产品上的标签,从而借助光学字符识别(OCR)技术,在正确的位置读取信息。这些多样化的应用场景表明:匹配技术几乎被应用于我们日常生活中所有产品的制造过程中,是现代工业生产不可或缺的基础技术之一。
最重要的方法是基于形状的匹配,它可以在实时条件下对各种物体进行精确且稳定的定位。这种方法的独特之处在于,即使目标发生旋转、缩放或部分遮挡,甚至位于图像边缘之外,或者光照条件不稳定,系统仍然能够实现卓越的、亚像素级精度的匹配结果。
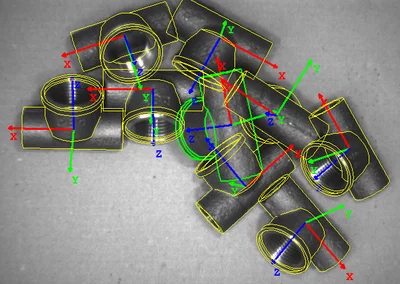
匹配技术同样适用于三维场景。例如,透视匹配是基于形状匹配的进一步发展,能够在三维空间中确定任意形状的平面物体部件的位置。
这种方法特别适用于存在倾斜角度、因透视而发生变形的部件。基于形状的匹配还可以根据物体的 CAD 模型,可靠地确定随机摆放的三维物体在三维空间中的位置和姿态。
MVTec 因其匹配方法在速度、稳定性和精度方面的卓越表现,被公认为国际领先的技术企业。其软件产品 HALCON 和 MERLIC 提供先进的匹配功能,其中包括创新的 Deep 3D Matching 技术。该方法基于特定物体的 CAD 模型对深度学习网络进行深入训练,能够实现极高的稳定性,大幅提升工业应用中如料箱拣选和拾取放置等任务的性能水平。在基于形状的匹配方面,HALCON 的扩展参数估计功能是一项全新开发,它支持在相关匹配应用中自动估算大量参数,省去了人工设定的步骤。因此,即使是机器视觉领域的新手,也能完成原本需要专家知识的复杂参数配置工作。
所有匹配技术都有一个共同的特点:它们在各个行业中显著推动了工业自动化的发展。
它们的应用通常能够降低成本和人力投入,同时提升生产质量。因此,“完美匹配”是现代机器视觉系统的关键要素之一,并将在未来继续发挥核心作用。