MVTEC HALCON
细胞介电谱 (CDS) 是一种基于阻抗的测量技术,将一个电压施加到细胞之间没有重叠的细胞层之上,测量相对于电压的电阻抗变化。这项技术不需要标签、染料或专门的试剂,而是依赖于以下事实:细胞质膜的特定细胞受体或糖蛋白具有针对特定粘附分子的结合位点。
使用抗体或人工试剂激活这些受体,细胞会发生形态变化,从而影响穿过细胞的电流变化。施加在细胞上电压的阻抗变化测量结果随后可用于指示特定受体的结合水平,这对于药物开发尤其有帮助。
为了进行这些测量,MDS Analytical Technologies(现为 Danaher Corp. 成员)等公司设计了一些系统,可自动对细胞应用不同试剂并使用 CDS 技术测量。例如,该公司的 CellKey 384 系统设计用于对 384 孔微量滴定板进行基于细胞的动力学筛选,可在 8 小时内处理最多 24600 个孔。
“为了正确测量每个微量滴定孔的阻抗,必须测量每个孔的电导,”Conductive Technologies 制造工程经理 Uwe Trautenbach 介绍道。作为制药行业的三级供应商,Conductive Technologies 制造了这些 384 孔微量滴定板,上面配备有专门用于这类测量任务的电化学传感器。

为了正确成像 5 × 3.5 英寸电极卡,首先将其放置在位于 Volpi 5 × 5 英寸白色光纤背光灯表面上的夹具中。这盏背光灯由同样来自 Volpi 的 IntraLED 2020 白色 LED 光源驱动,为电极卡表面提供均匀的 5.6-mlux 照明,通过主机 PC 的串行端口进行控制。
电极卡放置到位后,需要对所有 384 个电极进行成像。为了粗略定位电极在视野中的位置,将一台 Leutron Vision PicSight 202N CCD GigE Vision 相机安装在一个 Fisnar x-y-z 笛卡尔机器人的水平轴上。
“1624 × 1236 [像素] CCD 相机配合 Edmund Optics 90 毫米 VZM 450i 镜头,能够以 ±5% 的可重复精度对电极之间的 100 微米间距进行成像,”Trautenbach 介绍道。利用在 Windows XP Pro 上运行的 Robot Edit 软件,对机器人的路径和相机调焦进行编程,以确定每个电极的大致位置。机器人移动到特定位置后,触发相机系统,使用 Sealevel Systems 8012 低配置 PCI 数字接口卡对电极位置进行成像。
这会提供八个簧片继电器输出 (SPST) 和八个光学隔离输入,用于驱动机器人和触发相机系统。相机采集电极图像之后,将其通过 GigE Vision 接口传输到主机 PC 存储器,显示在 LCD 监视器上。“为了分析图像中电极的形状,先将采集的图像与以位图文件形式存储在主机 PC 中的已知合格主图像进行比较,”Trautenbach 解释道。这一过程使用 MVTec Software GmbH 的 HALCON 图像处理和机器视觉软件包进行。
为了正确成像 5 × 3.5 英寸电极卡,首先将其放置在位于 Volpi 5 × 5 英寸白色光纤背光灯表面上的夹具中。这盏背光灯由同样来自 Volpi 的 IntraLED 2020 白色 LED 光源驱动,为电极卡表面提供均匀的 5.6-mlux 照明,通过主机 PC 的串行端口进行控制。
电极卡放置到位后,需要对所有 384 个电极进行成像。为了粗略定位电极在视野中的位置,将一台 Leutron Vision PicSight 202N CCD GigE Vision 相机安装在一个 Fisnar x-y-z 笛卡尔机器人的水平轴上。
“1624 × 1236 [像素] CCD 相机配合 Edmund Optics 90 毫米 VZM 450i 镜头,能够以 ±5% 的可重复精度对电极之间的 100 微米间距进行成像,”Trautenbach 介绍道。利用在 Windows XP Pro 上运行的 Robot Edit 软件,对机器人的路径和相机调焦进行编程,以确定每个电极的大致位置。机器人移动到特定位置后,触发相机系统,使用 Sealevel Systems 8012 低配置 PCI 数字接口卡对电极位置进行成像。
这会提供八个簧片继电器输出 (SPST) 和八个光学隔离输入,用于驱动机器人和触发相机系统。相机采集电极图像之后,将其通过 GigE Vision 接口传输到主机 PC 存储器,显示在 LCD 监视器上。“为了分析图像中电极的形状,先将采集的图像与以位图文件形式存储在主机 PC 中的已知合格主图像进行比较,”Trautenbach 解释道。这一过程使用 MVTec Software GmbH 的 HALCON 图像处理和机器视觉软件包进行。
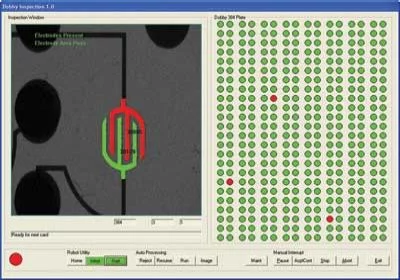
“对图像进行比较之后,可以在采集的图像中分离出已知合格的感兴趣区域 (ROI),以便定位电极对,”Trautenbach 介绍道。定位 ROI 之后,对其进行阈值处理,以便在电极卡的 PET 膜背景中突出显示金电极。提取后,就可以检查电极的形态。
“ROI 中应该只有两个电极,”Trautenbach 指出。因此,如果对 ROI 内连通像素区域的数量进行计数,应该只返回两个连通区域的值。例如,如果系统返回值为 1,则电极可能熔合,可以剔除。如果系统返回的结果大于 2,则电极可能已损坏。
“确定单对电极的存在之后,执行电极面积测量,同样是使用 HALCON 确保正确进行阻抗测量。通过在特定的预定值范围内测量该电极面积,可以建立合格/不合格标准,也可确定是否应当记录或向操作员标出合格/不合格的判断。虽然在 HALCON 8.0 视觉应用开发环境中对视觉系统进行编程只花了几天时间,”Trautenbach 介绍道,“但大部分编程开发都花在了基于 Visual Basic (VB) 6.0 的用户界面、逻辑和机器人操作上。”
视觉算法完成后,使用内置的 HALCON 软件工具将其导出,并嵌入到 Visual Basic 软件开发工具包 (SDK) 中。除了图像采集和处理外,VB 还支持 I/O 和 CNC 机器人的主机用户界面和逻辑。测试每个电极卡之后,结果会显示在 LCD 监视器上。在这块屏幕上,操作员可以调用和查看任何标记为可能有故障的电极对图像,并对零件执行最终合格/不合格判断。或者,当系统检查每个电极对时,操作员也可以对系统进行编程,在检查的过程中停下显示任何可能的故障。“通过这种方式,”Trautenbach 介绍道,“操作员可以在分析整个电极阵列之前确定故障并剔除零件。”
Conductive Technologies 开发这套系统的成本约为 65000 美元,主要用于其自身对微量滴定电极阵列的内部测试。
作者:Andy Wilson
感谢 Vision Systems Design 提供本文。产品/商标的所有产品名称、商标和图片版权均属于其持有者。保留所有权利。
发布日期: 八月 30, 2013