MVTEC HALCON
Jtekt Torsen 是一家为汽车工业制造齿轮和差速器的公司。为了生产一款新型差速器,该公司将现有机床组建成一套灵活加工单元。出于经济方面的考虑,他们决定借助一台基于机器人的装卸系统彻底实现生产自动化。具体来说,他们的想法是:为一台机器人装备一个“箱中取物系统”(Bin Picking),由这台机器人为灵活加工单元中的两个子加工装置供应部件。机器人制造技术系统集成商 Ceratec 公司接受了该项目的委托。Ceratec 在项目规划期间便将 3D 视觉的部件和服务提供商 Phaer 公司招入麾下,共同实现并达成了客户的愿望。解决新路子——在汽车工业中,要生产一个新部件,典型做法是逐步开发生产项目:首先设计部件并制造样品,接下来就是据此拟定生产方案。最后,逐渐提高产量,直至达到目标产量。而具体到本文中的案例,该项目涉及安装在齿轮装置中的四种部件,它们都在这一个灵活加工单元内加工。Jtekt 最开始的做法是人工为材料加工机床补料。但很明显,这种做法是无法长久的,因为给机床补料的工作非常单调枯燥,难以长期坚持。而且,由于时间紧迫,操作人员无法在为所有机床装料的同时还能兼顾质量。因此,Jtekt 必须给这项任务找到一种与生产流程相匹配的自动化解决方案。

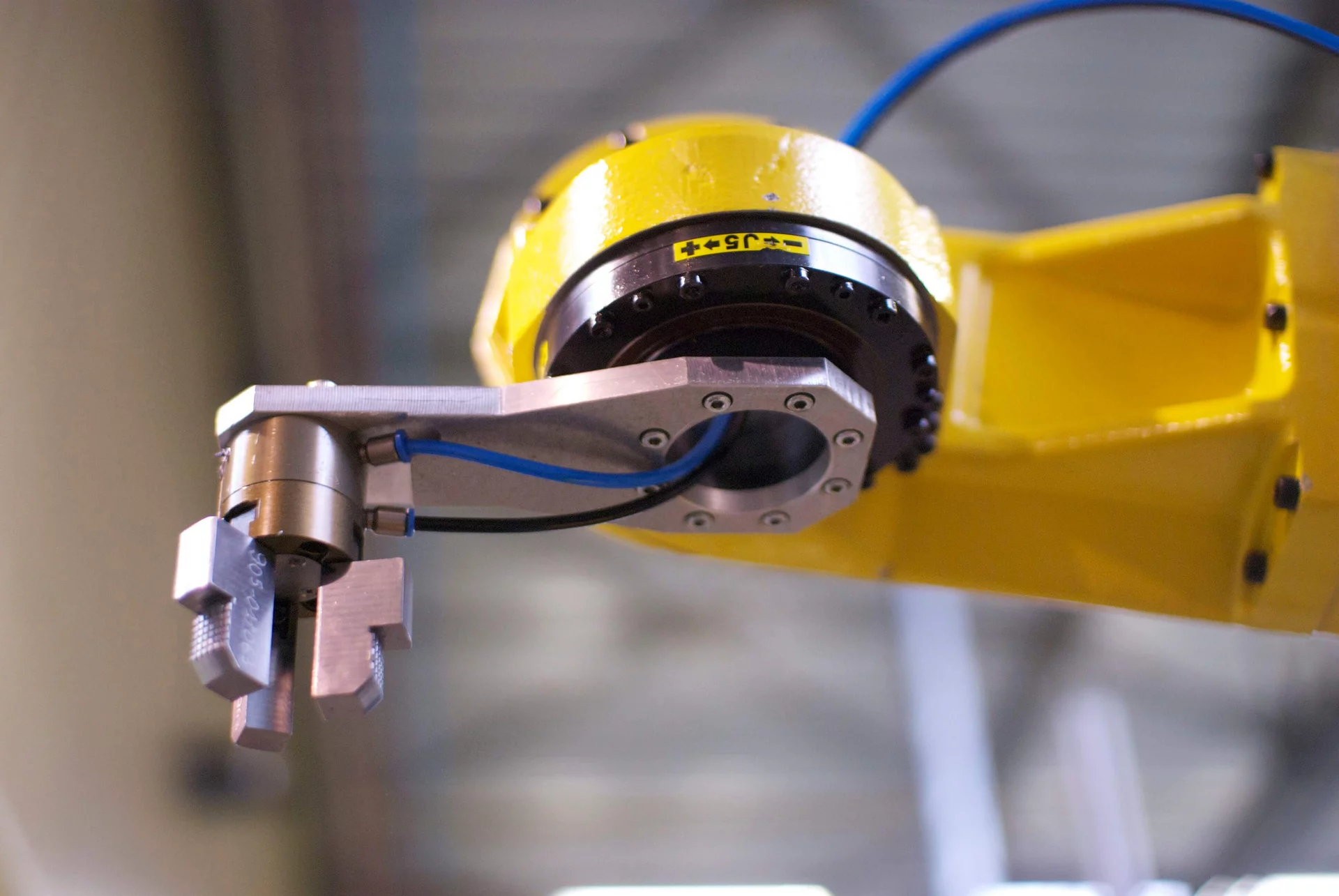
一个部件分三个步骤完成加工,这三个步骤视部件类型而定总共需要大约 1 分钟到 1.5 分钟。加工过程本身借助两台 CNC(计算机数控)机床完成:一台是加工齿轮用的铣床,一台是配备两个刀具的车床。在这两台 CNC 机床中间有一台装卸机器人,它们三者被一个安全框架包围起来,形成一个整体。控制单元位于安全框架之外。

坯件杂乱地装在一个金属箱内。箱子里大约有 3500 个钢坯件,总重约为一吨。箱子被放在两根滑轨之间,并用一个锁止器锁止,因此箱子就可以被带到并固定在图像采集系统下方。一条激光线投射到箱子表面上,被一台摄像机采集。这样就可以对箱子表面进行分析,并精确确定部件的空间位置。接着,图像处理系统将决定夹取哪个部件,并向机器人发出相应指示,由此避免机器人在工作中发生碰撞。机器人夹取所选工件,将其交给一台用于空间定位的控制装置。工件被放到一条作为给料系统给铣床上料的传送带上。在第一个加工步骤结束后,机器人再次夹取该部件,将其递给下一台机床的第一个加工头。
在后面的加工中,此处会自动换刀。部件完成加工后,被自动从车床运送至一个提取系统,该提取系统又将工件交给控制装置。所有这些步骤并非是串行的,而是在相互细致协调的前提下部分并行运作,因此各个加工阶段的加工时间并非简单地累加,而且部分重叠。
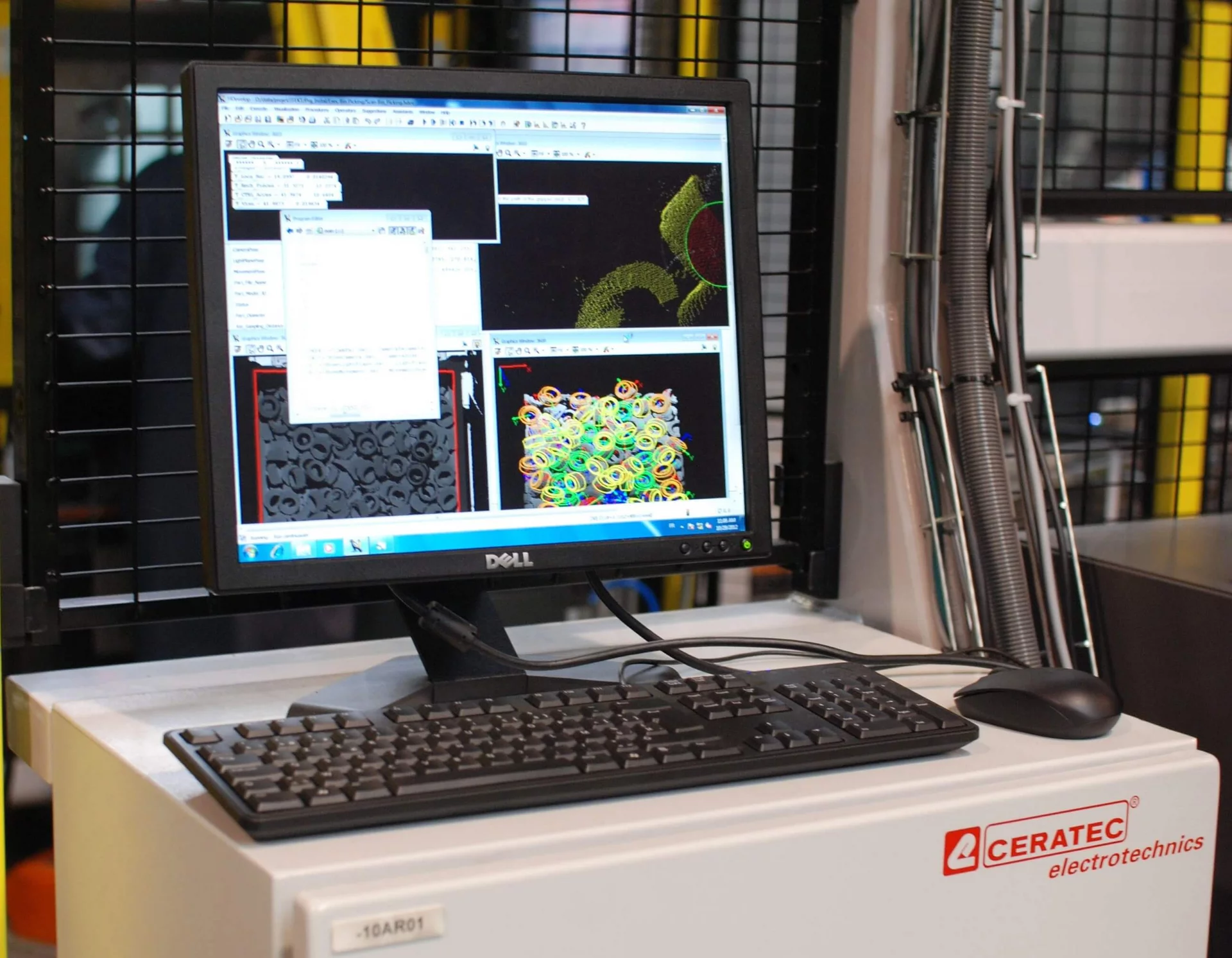
目前,图像处理系统已被集成在机器人内,为客户提供标准解决方案。Phaer 专门开发的视觉系统装设在材料箱上方,由一个激光线投影仪和一个摄像机组成,摄像机是安装在一个可移动装置上的。激光线投影仪在箱子表面投射激光线,摄像机负责记录。摄像机以 20° 的角度定向,这样就可以完整记录激光线的走向。该视觉系统基于三角测量原理工作。扫描线由 1000 个像点组成。激光器在表面上投射出点阵,摄像机将此点阵拍摄下来。图像处理软件将点阵拼合成一个 3D 点云,该点云反映的就是扫描出的箱内部件的表面。该图像处理软件基于 MVTec 公司的 HALCON 开发。合成的 3D 图像的分辨率为每 2 至 3 mm 一个像点。该图像处理软件能够识别箱内部件在三维空间内的精确位置。识别到的部件被标上颜色,颜色代表了部件的可达性。为预测可达性,软件会在一个识别到的工件的坐标处模拟出一个虚拟圆柱体,并检查该圆柱体与所测得的 3D 表面的交点。这个圆柱体就代表了机器人夹爪的所占体积。这样做能确保夹爪绝不会与其他部件发生碰撞。类似的方法也可避免夹爪与箱子边缘发生碰撞。在实践中,系统并非总是需要对整个箱子的表面进行分析,一旦找到一个合适的坯件,将立即停止分析。由于灵活加工单元是针对四种部件的生产而设计的,因此所开发的软件也由四个模块组成。但子加工装置的数量是没有限制的,系统可随时扩展,从而加工新的部件型号,增添其他功能。
生产已达到全负荷。每年总产量可达到 800,000 件。汽车工业奉行“Just in Time”原则。仓储管理在这里行不通。因此,一种部件类型是不能一次性生产整个批次的。在实践中,该公司选择使用中小型生产装置,同时生产四种不同类型的部件。在此,这套视觉系统的灵活性就展现出了决定性的优势,它能够在各部件型号间快速切换,极大地节约了时间。
作者:Lutz Kreutzer 博士。
我们非常感谢 inspect 专业杂志允许我方刊登此文。所有产品名称均为注册商标,产品/商标的图片受持有人版权保护。保留所有权利。
发布日期: 七月 09, 2015