MVTEC HALCON
WUR Agro Food Robotics 计划是瓦赫宁根大学及研究中心多个研究小组合作开发的计划。这项计划尝试通过开展可行性研究、功能设计、原型开发、测试、验证并支持新产品实施,将新知应用于实践

在过去几十年间, 温室食品生产 面临的挑战有生产设施规模的扩大、劳动力需求的增加以及消费者对产品质量要求的提高。许多操作仍然靠人工完成,例如采摘。然而,能够接受恶劣温室气候条件下重复性工作的熟练劳动力数量正在迅速下降。 机器人和传感技术 是一种替代解决方案,可使作物生产更加高效且更具可持续性。
WUR 在欧洲研究项目“Clever Robots for Crops”(CROPS)(后更名为“Sweet Pepper Robot”项目 (SWEEPER))下开发了一种用来采摘甜椒的机器人。原型包括以下模块:剪下并抓住甜椒的工具、包含彩色和 3D 信息的相机、六自由度工业机械臂、计算机和电子设备,全部组装在一个电池驱动的平台上,这个平台可以使机器人在温室中自主移动。一旦相机系统发现一株成熟的甜椒,机械臂就会将工具定位到这株作物的茎杆上方。然后,机械臂会将工具向下移动几厘米,用振动刀从植物主干附近切下甜椒作物。
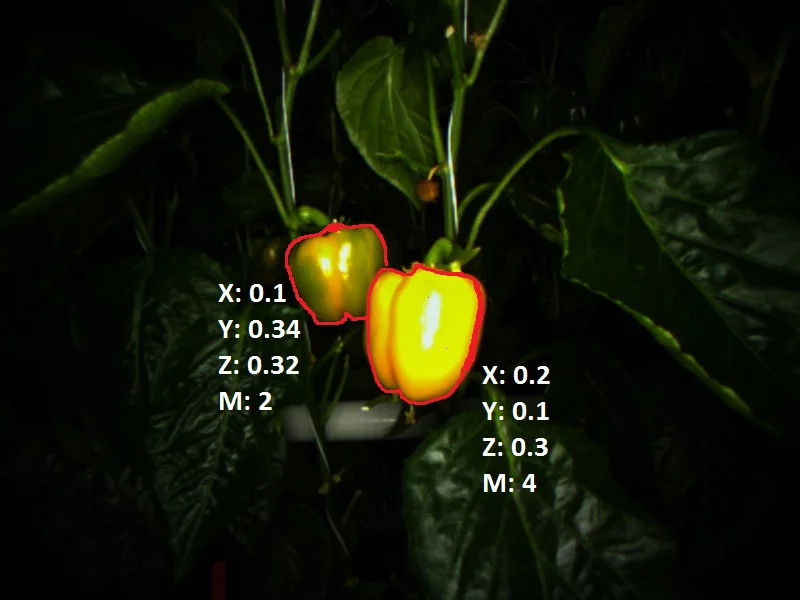
SWEEPER 机器人的核心功能是检测成熟作物。为了操作成功,必须高度精准地确定每株作物的 3D 位置。选定的解决方案基于 RGB-D 相机,可同时报告颜色和深度信息。使用这款相机和基于 LED 定制的闪光灯照明系统,可从远距离和近距离采集植物的 RGB 图像。为方便高帧率运算,使用 HALCON 实施基于形状和颜色的简明检测算法。该算法会扫描采集到的每一张图像,寻找与目标颜色阈值匹配的区域。通过移除超过预定义最小/最大尺寸的检测结果,可以筛选已检测到的区域。同时还会计算区域的其他形状参数,以便进一步去除错误检测。最后,利用来自相机的深度信息计算所检测区域的体积。使用该信息亦可进一步删减错误检测,避开不可采摘的作物丛,并可定义采摘的顺序。使用从所检测区域提取的深度信息,通过将该区域像素转换至世界坐标系,可以精确计算质点的 3D 位置。根据分类为待采集辣椒的区域子集,定义采摘排序的方法。接着,机械臂接近目标,通过视觉伺服控制使目标保持在图像中间,直至到达目标。
您可以在 此处下载完整的成功案例
发布日期: 七月 02, 2019