MVTEC HALCON

意大利布雷西亚大学工程系光电实验室的 Giovanna Sansoni 教授领导研究人员开发了一种基于视觉的机器人酒保,可为顾客供应不同品种的啤酒。这套系统由 Denso Europe(荷兰韦斯普)委托开发,旨在展示如何协同使用视觉和机器人系统。
机器人左右臂由两个嵌入到胸廓形状外壳中的 Denso VP-6242G 机器人组成,上面安装了基于 PC 的监控系统。机器人左臂装有气动平行抓取器,可从传送带上拿起啤酒瓶,将酒倒入杯子中;右臂则装有塑料手和开瓶器。
机器人下方有一张工作台,上面有一个可以 180° 旋转的托盘。顾客将空杯放到工作台上之后,机器人酒保会检测到杯子,并用右臂转动工作台以便倒满杯子。然后再次转动工作台,将装满的杯子递给顾客。为采集酒瓶和杯子图像,视觉系统使用两台 IDS Imaging(德国上苏尔姆)的 CMOS 数字 uEye 1540-M 1280 × 1024 像素 USB 2.0 相机,其中一台安装在控制系统监视器顶部,另一台安装在机器人右臂末端。
两台相机都连接到基于 PC 的监控系统,其中运行着德国慕尼黑 MVTec Software 出品的 HALCON 9.1 软件。该软件集成了一套以 VB.NET 编写的运动控制软件例程,使用 Denso 的机器人 Orin 接口。软件可控制工作台旋转,取瓶、开瓶、倒酒操作,以及传送带和机器人处理机构。

系统初始化和标定完成后,由控制器上方的相机采集工作台图像。通过 Blob 分析计算杯子数量。然后,通过图像侵蚀和区域过滤来区分可以倒酒的杯子与倒扣的杯子。
检测到预定义数量的杯子之后,工作台会移动到系统后方,确定每个杯子的中心坐标之后再倒酒。
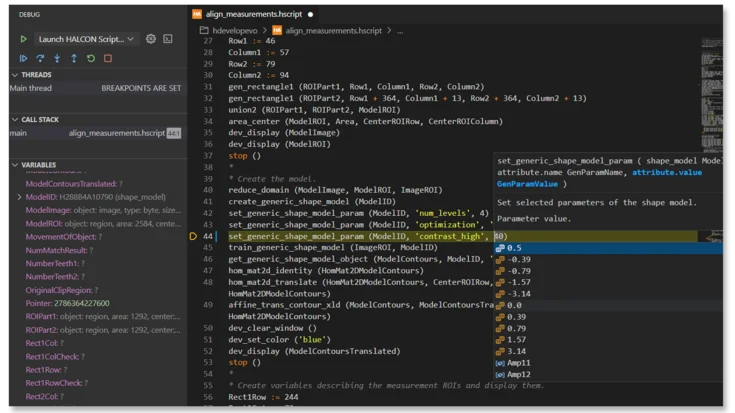
酒瓶出现在传送带上后,机器人右臂末端的相机会进行定向,以便采集每个酒瓶的图像。由于传送带上可能放有各种不同的物体,因此要通过物体检测和分类例程来确定物体的性质(见图 2)。
如果物体是啤酒瓶,则软件会将传送带上未知啤酒品种的图像与已知酒瓶模板库进行比较,以确定其中盛装啤酒的品牌。确定为正确类型的啤酒后,会将酒瓶从传送带上取下、打开并倒入杯子。视觉引导系统还会处理传送带上放有未知物体的情况;如果检测到,机械臂会将其移除。尽管机器人酒保的开发人员已成功证明系统性能符合预期,但服务机器人不太可能取代人类酒吧工作人员。开发该系统的唯一目的是证明视觉引导机器人在工业环境中的有效性。形状或颜色的缺陷。
作者:Andy Wilson
感谢 Vision Systems Design 提供本文。产品/商标的所有产品名称、商标和图片版权均属于其持有者。保留所有权利。
发布日期: 九月 04, 2013