MVTEC HALCON
一家生产采矿业气体探测器专用小型塑料零件的制造商需要一台新机器在这些零件上自动进行激光钻孔,他们找到激光专家 ES Technology Limited(英国牛津),希望为此目的专门设计一台机器。ES Technology 得到了 RNA Automation(英国伯明翰)多名机器设计师及其合作伙伴 Fisher Smith(英国凯特林)的帮助,他们为机器开发了一套视觉系统,可以自动检查零件,确保准确钻孔。需要检查的塑料零件有 11 种以上的不同变体,钻孔直径为 15-50 微米不等。系统需要适应所有的变体:检查每个变体以确定其位置,以及塑料上孔的入口和出口尺寸。此外,它还需要足够灵活,以便操作员能够在不同批次之间更换零件工装以便操作员能够在不同批次之间更换零件工装。这套系统包含一个进料盆,将特定批次类型的零件装入其中。然后,由视觉引导机器人系统识别零件,并将其放置在步进梁传送系统的固定位置上。
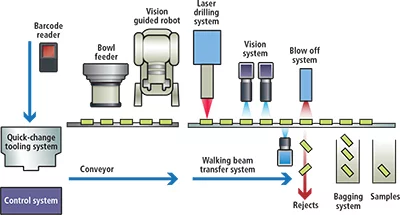
接着,由紫外线激光钻孔系统在零件上钻出沙漏形状的孔,再将零件移动通过另外三个视觉工作站,对零件进行检查。检查完成后,将零件输送到两个箱子上方,分别进行接受和淘汰处理(图 1)。
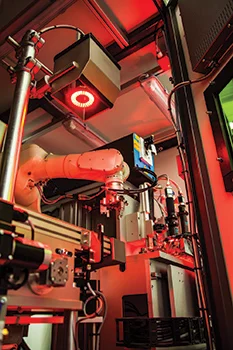
由于要生产的塑料零件种类繁多,他们开发了一套系统,使操作员能够更换机器上的工装以便适应不同的产品批次。为此,控制机器整体操作的 Mitsubishi(日本东京)PLC 经过编程,能够识别与要生产的每批产品相关联的唯一条形码。扫描条形码之后,触摸屏界面上会向用户显示之前已编程完毕并存储在 PLC 上的针对特定类型零件的工装设置参数。这些参数向操作员指明了应安装在进料盆和步进梁系统上的工装类型。此外,PLC 可以自动识别是否安装了不正确的工装套件,从而消除人为疏忽的风险。只需不到 5 分钟的时间即可完成经过充分验证的工装更换,适应不同的塑料零件,从而延长正常运行时间,提高生产效率。将正确的工装安装到机器上之后,即可对零件进行钻孔和检查。在流程开始之前,先将未加工的塑料零件装载到 RNA 振动进料盆中,进料盆晃动零件,使其落在直线传送带上。然后,由 Kawasaki(英国沃灵顿)六轴机器人从传送带上拾取零件,并将其放入步进梁系统的第一个夹持器中,步进梁系统再使用气动夹持器将每个零件从直线传送带上依次转移到一系列视觉工作站(图 2)中的第一个视觉工作站下。在激光钻孔之前,需要确保 Kawasaki 机器人从直线传送带上拾取零件并正确定向每个零件后,再将其转移到步进梁系统。为此,对在 PC 上运行的 Fisher-Smith GenVis 软件进行训练,使用 MVTec(德国慕尼黑)HALCON 基于形状的匹配算法创建每个塑料零件的模板。
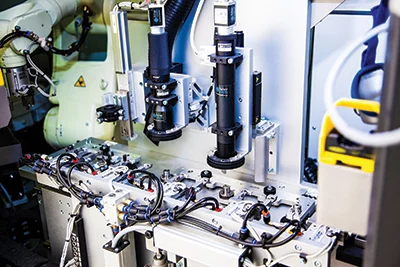
在第一个视觉工作站,由 Basler(德国阿伦斯堡)的 Ace 2048 x 2048 400 万像素单色相机拍摄待检查零件的图像,该相机配有 50 毫米镜头,由 Vision & Control(德国维尔茨堡)的 RK2036-R 环形灯具提供照明。然后,图像通过 GigE 接口传输到 PC,由软件将图像与模板进行匹配。在此过程中,软件会确定在零件图像中找到的关键特征的位置,以及它们相对模板旋转的角度。然后,PC 计算必要的位置和旋转变换,以确保机器人能够在钻孔之前以正确的方向拾取零件并将其放置在步进梁系统中。最后,位置和旋转数据通过以太网接口从 PC 传输到机器人控制器。在某些情况下,如果传送带上的塑料零件彼此靠得太近,由于执行器与零件可能发生碰撞,机器人头部的末端执行器可能无法拾取单个零件。为了避免这种情况,执行 Blob 分析,确定要拾取的零件周围区域有无障碍。如有障碍,则认为该零件无法由机器人有效地从生产线上取回,由机器人对传送带进行转位,以便通过退回传送带将零件回收到进料盆中。进料盆工装可在很大程度上避免此类情况,确保从传送带高效收集零件。机器人拾取零件并正确定向后,将其放置在步进梁传送系统中,该系统可确保零件在钻孔和检查过程中保持正确定向。然后,将零件移动到 ES Technology 提供的紫外线激光钻孔系统下,该系统使用来自 Lee Laser(美国佛罗里达州奥兰多)的 12 瓦二极管泵浦紫外线激光器在塑料中钻出沙漏形孔。零件钻孔完成后,通过步进梁将其升起并移动到下一个视觉工作站进行检查。
在第二个视觉工作站,再次检查零件以确定钻孔的位置,确保没有在钻孔工艺之前引入旋转误差。为此,使用 Vision & Control RK2036-R 环形灯具从上方照亮零件,并使用另一台配有 Vision & Control T-107 远心镜头的 Basler 2048 x 2048 单色 400 万像素相机拍摄零件图像。然后通过 GigE 接口将图像传输到 PC,由形状识别算法对零件进行识别。接下来,由阈值算法确定孔的位置,并测量孔的 2D 坐标。系统确定孔是否已在正确的位置钻出之后,由步进梁系统将零件移动到另外两个视觉检查工作站。在此测量孔的入口尺寸和出口尺寸。这两个关键特性会影响与零件配合的传感器的工作精度。在入口孔测量视觉工作站,零件由另一盏 Vision & Control RK2036-R 环形灯具照明,顶面的图像由第二台 Basler Ace 2048 x 2048 400 万像素单色相机拍摄,该相机配有 Vision & Control x20 倍远心镜头,可提供 1.2 毫米视野和 5 微米景深。孔的尺寸测量是一项挑战,因为塑料中的孔本身是沙漏形状,而每个塑料零件的厚度变化可达 100 微米,并且零件的放置可能还会引入较小的高度误差。为了克服由独特形状、零件厚度的可能变化和相机有限的景深所造成的困难,将相机安装到来自 Physik Instrumente(英国贝德福德)的伺服驱动精密滚珠丝杠滑块上。
零件进入入口/出口尺寸检查工作站之后,PC 上运行的 Fisher-Smith 自有 GenVis 软件会指示滑块从预编程的起始位置以 5 微米步进垂直移动相机。然后,相机会触发,在滑块以 5 微米步进移动相机经过 300 微米垂直距离的同时,连续采集零件顶面的 60 张图像。为了控制伺服驱动器以适应要检查的各种零件,伺服通过 RS-232 接口连接到基于 PC 的视觉系统。这样,GenVis 软件就能为每个零件定义图像采集过程的起点和终点。
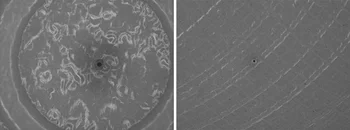
由 GigE 相机采集的 60 张图像通过 GigE 接口传输,由在 GenVis 基于 PC 的软件环境中运行的 HALCON 图像分析算法进行分析,以确定孔在其标称入口处的尺寸。软件会对 60 张图像逐张进行分析,找出其中入口孔图像聚焦最佳的一张。这是通过检测孔圆周边缘周围灰度强度的变化来实现的。当相机采集的一张图像位于聚焦位置上时,该图像强度梯度的方向性变化会更大一些。因此,软件可以通过从 60 张图像中找出具有最大强度梯度的图像来确定位于聚焦位置的图像。之后,采用边缘检测算法来确定该图像中孔的具体尺寸(图 3)。确定入口孔的尺寸之后,步进梁系统就会将零件转移到最后一个视觉检查工作站。在此,零件由第三台 Vision & Control RK613-R 环形灯具照明,而步进梁下方滑道上安装的同样的视觉系统和另一台 Basler 相机则会再采集 60 张零件底面的图像。某些零件的出口处表面非常粗糙,无法进行正面照明。在这种情况下,在零件上方使用 Vision & Control RAL10-7-R 聚光灯,照出孔的轮廓。60 张图像同样是通过 GigE 接口传输到 PC,由 HALCON 软件以类似方式确定其中零件底面上孔的大小(图 3)。零件检查完毕后,步进梁会将其移动到步进梁末端,到达合格品或不合格品滑槽上方。此时,PLC 已汇总由视觉工作站的孔位置、入口孔和出口孔相机采集的所有合格或不合格结果,然后指示步进梁松开其固定零件的夹持器,将零件放入两个滑槽中的一个。为了向制造商提供检查程序结果的详细信息,每个零件的所有相关检查参数都会在 PC 上进行整理并存储在磁盘上,数据可以用 .csv 文件格式输出到制造商自己的 Minitab(美国宾夕法尼亚州州立大学)统计过程控制 (SPC) 系统中。通过从质量控制的角度分析数据,制造商可以确保系统一直发挥最大工作能力,还可使用这些信息维护和改进上游工艺。
作者:Robert Fisher。
感谢Vision Systems Design提供本文。产品/商标的所有产品名称、商标和图片版权均属于其持有者。
保留所有权利。
发布日期: 八月 19, 2015