这就是我们
新闻中心
联系我们
CN
EN
English
DE
German
Login
CN
Login
EN
English
DE
German
产品
返回概览
HALCON
返回概览
功能与工具
文档
版本和许可
MERLIC
返回概览
功能與工具
文件資料
授權方案
深度学习工具
返回概览
功能与工作流程
版本与许可
Release Notes
嵌入式视觉
返回概览
移植服务
接口
返回概览
标定板
返回概览
服务与支持
返回概览
定制化解决方案
返回概览
免费应用评估
可行性研究
您的项目
培训与学习
返回概览
MVTec Academy
客户专属工作坊
全球培训
合作伙伴
返回概览
HALCON 销售合作伙伴
MERLIC 销售合作伙伴
认证集成商
技术合作伙伴
技术支持
返回概览
应用领域
返回概览
机器视觉应用
返回概览
质量检测
目标识别
测量
识别
3D 匹配
行业
返回概览
农业
汽车与机器人
电池生产
教育、研究与科学
电子元件与太阳能
食品与饮料
玻璃、金属、纸张、箔纸与印刷
工业物联网
内部物流和自动化仓库
机械
医疗设备与制药
半导体
成功案例
返回概览
白皮书
返回概览
算法资料库
返回概览
产品文档
返回概览
视频资料
返回概览
技术
返回概览
3D视觉
条形码和二維码的读取
斑点分析
图像分类
计算成像
深度学习
滤波
检测
匹配
测量
形态学
OCR
亚像素边缘和线条提取
最新资讯
返回概览
活动
返回概览
机器视觉洞察
返回概览
开发人员专区
返回概览
研究与教学
返回概览
用于科研的数据集
返回概览
我们的学术发表
返回概览
下载
返回概览
MVTec 软件管理器
返回概览
HALCON
返回概览
MERLIC
返回概览
深度学习工具下载
返回概览
接口
返回概览
这就是我们
新闻中心
联系我们
MVTec Software – 机器视觉专家
算法资料库
返回概览
产品文档
视频资料
技术
最新资讯
活动
机器视觉洞察
开发人员专区
视频资料
MVTec 软件
轻松学习
的影片与教程
通过 MVTec 资源加速您的机器视觉项目。本页面提供简洁的视频、逐步教程和按需网络研讨会,专注于实际工作流程和 HALCON、MERLIC 以及深度学习工具的真实应用案例。
使用筛选器找到适合的视频!
视频类型
请选择
功能介绍
应用示例
点播网络研讨会
教程
产品
请选择
标定板
深度学习
深度学习工具
嵌入式视觉
HALCON
MERLIC
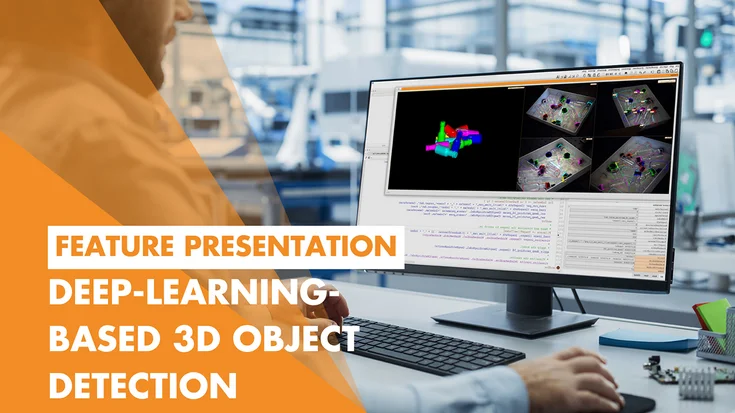
MVTec HALCON 中的 Deep 3D Matching (深度3D匹配)
Deep 3D Matching 是一种基于深度学习的新技术,能够利用二维图像实现快速、稳健的3D物体检测与姿态估计。该技术参数化需求极低且性能卓越,使其成为箱内拾取和机器人操作等应用的理想选择——即使在严苛环境下也能稳定运行。…
观看视频
功能介绍
HALCON
网络研讨会: HALCON 25.05 的最新功能
在本次网络研讨会中,MVTec 中国的应用工程师向您介绍新版 HALCON 的新功能。
观看视频
点播网络研讨会
HALCON
MERLIC 5.7 网络研讨会: 新功能
在由 Ulf Schulmeyer(MERLIC 产品经理)和 Xin Jin(应用工程师)主讲的网络研讨会上了解 MVTec MERLIC 5.7 的所有信息。
观看视频
点播网络研讨会
MERLIC
质量检测:利用基于深度学习的机器视觉快速准确地发现缺陷
使用机器视觉的自动化质量检测工作流程是什么样的? 了解深度学习如何提高生产线的效率。
观看视频
应用示例
深度学习
如何在 MVTec HALCON 中设置与使用线扫描相机
本教程中,我们演示如何在 MVTec HALCON 中用线扫描相机完成图像采集——从触发设置到明暗校正,助你获得稳定而准确的结果。
观看视频
教程
HALCON
线扫描相机介绍
在本视频中,我们将向您初步介绍线扫描相机。
观看视频
教程
HALCON
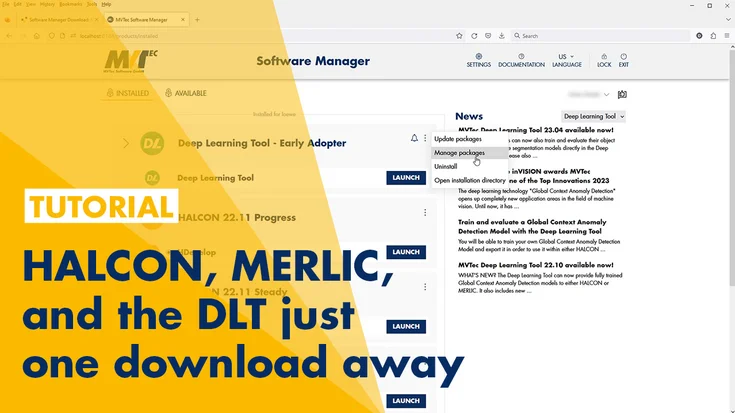
如何使用 MVTec 软件管理器
一键下载 HALCON, MERLIC 和深度学习工具
观看视频
教程
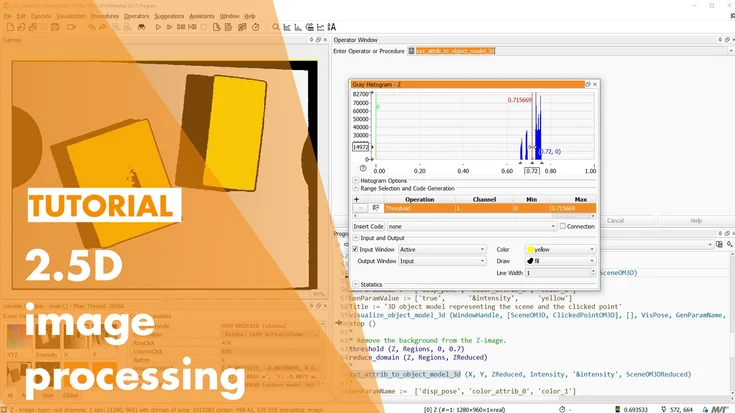
XYZ 映射 2.5D 图像处理(MVTec HALCON)
在本教程中,您将了解 MVTec HALCON 中的 XYZ 映射、它们为什么有用以及如何有效地使用它们。
观看视频
教程
HALCON
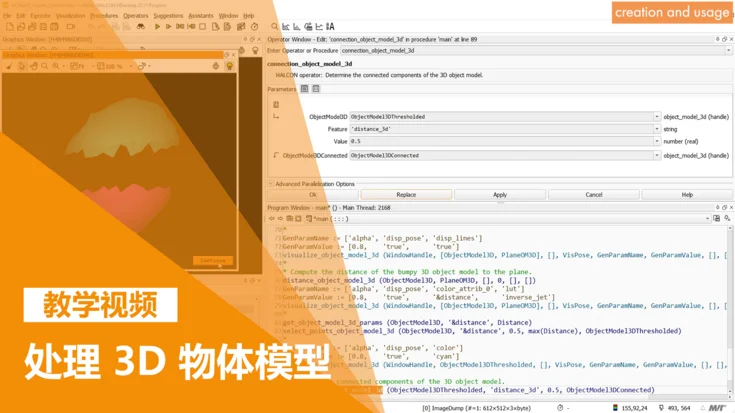
处理 3D 物体模型
本教程演示我们如何在 MVTec HALCON 中创建、可视化并处理 3D 对象模型,包括采样、三角化、平滑和缩放等步骤。
观看视频
教程
HALCON
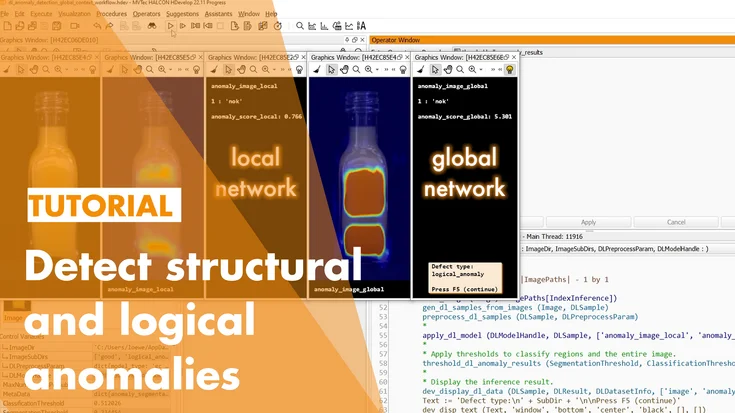
MVTec HALCON 中全局上下文异常值检测
在本教程中,您将了解到在 MVTec HALCON 中使用基于深度学习的全局上下文异常值检测。
观看视频
教程
深度学习
HALCON
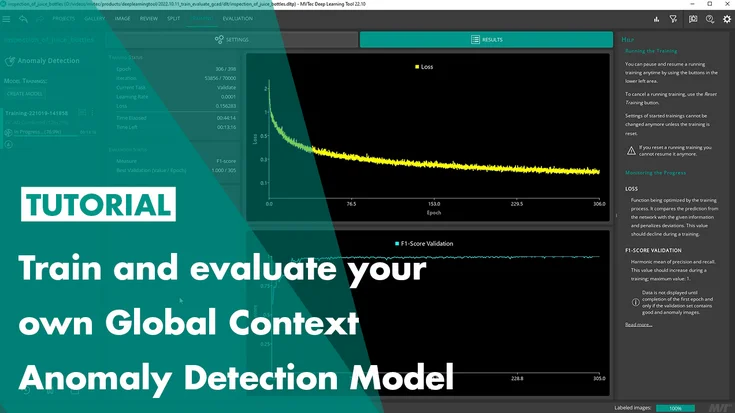
使用深度学习工具训练和评估全局上下文异常检测模型
观看本教程后,您将了解如何使用 MVTec 深度学习工具训练和评估全局上下文异常检测模型。
观看视频
教程
深度学习工具
使用 MVTec MERLIC 进行全局上下文异常检测
在本教程中,您将学习如何使用 MVTec MERLIC 的“检测全局上下文异常”工具,该工具具有 MVTec 最先进的全局上下文异常检测技术。 该工具允许 MERLIC 用户检测其图像的逻辑和结构异常。
观看视频
教程
MERLIC
Seite 1 von 6
Erste Seite
Vorherige Seite
Seite 1
1
Seite 2
2
Seite 3
3
Seite 4
4
Seite 5
5
Nächste Seite
Letzte Seite
搜索词
搜索