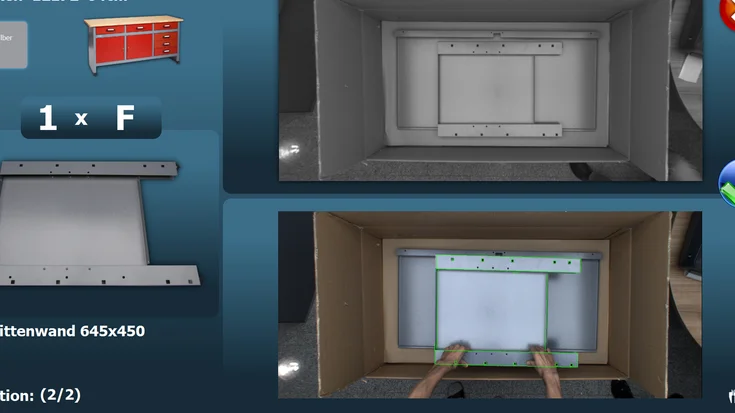
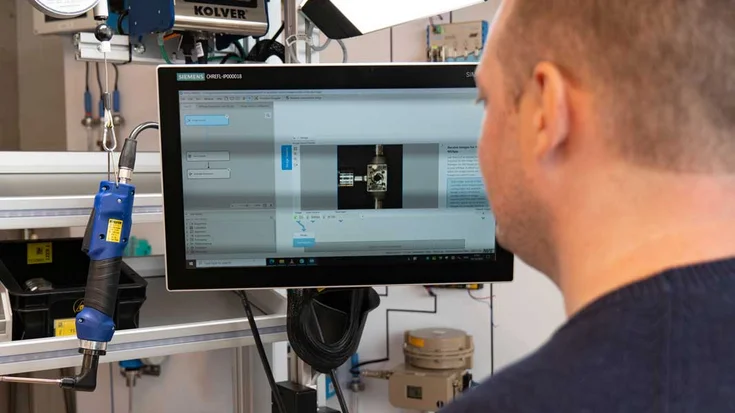
Die industrielle Bildverarbeitung unterstützt bei Endress+Hauser die manuelle Montage von Durchflussmessgeräten. Aufgrund der hohen Varianz der Bauteile und Losgröße 1 ist eine vollständige Automatisierung hier tatsächlich nicht sinnvoll. So arbeitet…
MERLIC
Maschinenbau
Lesen von Bar- & 2D-Codes
Deep Learning
Inspektion
Objektdetektion
Semantische Segmentierung


![[Translate to German:] Warehouse where cheese wheels age during the ripening process](https://www.mvtec.com/fileadmin/_processed_/1/d/csm_success_story_mvtec_eberle_2_673d7c329f.webp "[Translate to German:] Cheese Warehouse with Stored Cheese Wheels")