MVTec 软件同时提供这两种方法。两种方法相互补充,并针对不同场景进行了优化:
基于形状的 3D 匹配
使用由 CAD 模型表示的已知物体的多个 2D 视图。系统根据物体的形状确定其 3D 位置。
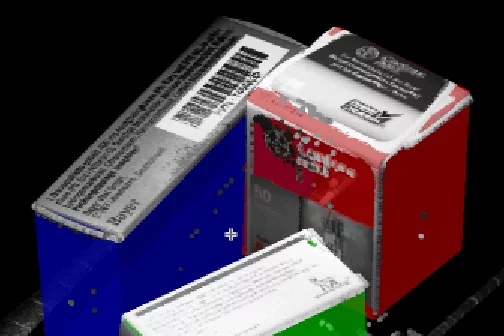
基于表面的 3D 匹配
将点云与距离图像结合起来,可可靠地检测物体,即使面对平滑或缺少特征的表面也是如此。
两种方法都支持对物体位置进行精细调整,并常用于质量检测、机器人应用和自动化装配流程

Please note: Once you watch the video, data will be transmitted to Polyv. For more information, see Google Privacy.
激活视频
Please note: Once you watch the video, data will be transmitted to Polyv. For more information, see Google Privacy.
激活视频