MVTec 软件提供强大的功能,用于重建三维形状。与商业 3D 传感器的接口支持灵活的图像捕捉。
此外,我们的软件包括用于创建 3D 深度图和点云的工具,采用像多视角立体 ( MVS ) 或光条 ( 激光三角测量 ) 等方法。为了高效的后续处理,集成的平滑、下采样和三角化功能确保优化的可视化和性能。
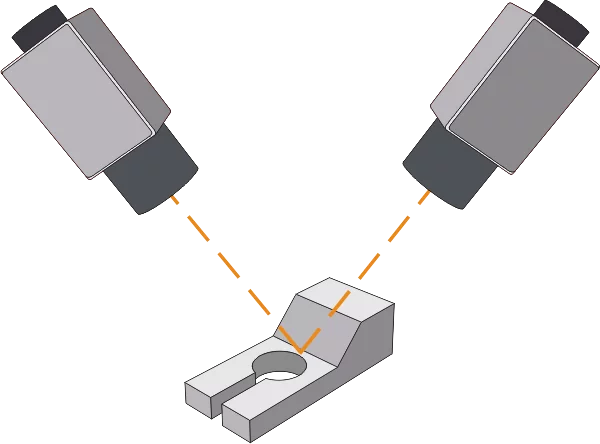
双目立体视觉 / 多视角立体视觉
立体视觉用于 3D 重建和复杂物体的定位。它特别适用于中到大尺寸物体的结构表面,常用于质量控制。
双目立体系统(双摄像头设置)。
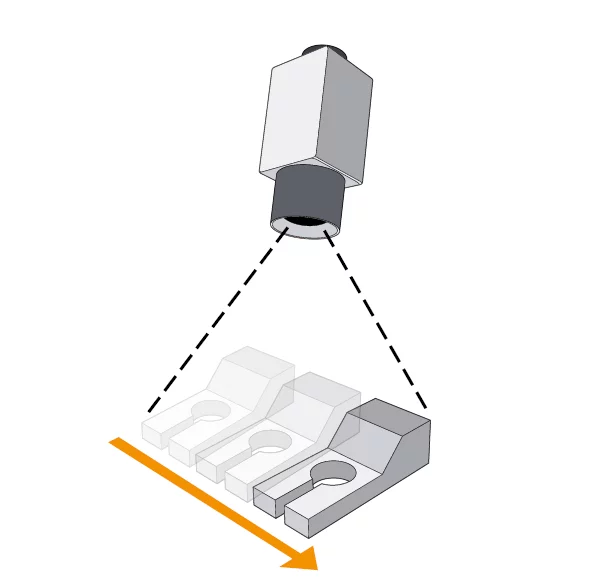
多摄像头设置(多视角)。
通过相对运动计算深度的单摄像头。
立体视觉也可以作为 3D 匹配的预处理步骤。该技术通过密集的范围图像或使用特征点和边缘计算 3D 坐标,适用于精确的高程测量。集成的分层立体插值可以在均匀区域内插入 3D 数据,尤其对于小物体具有非常高的精度。
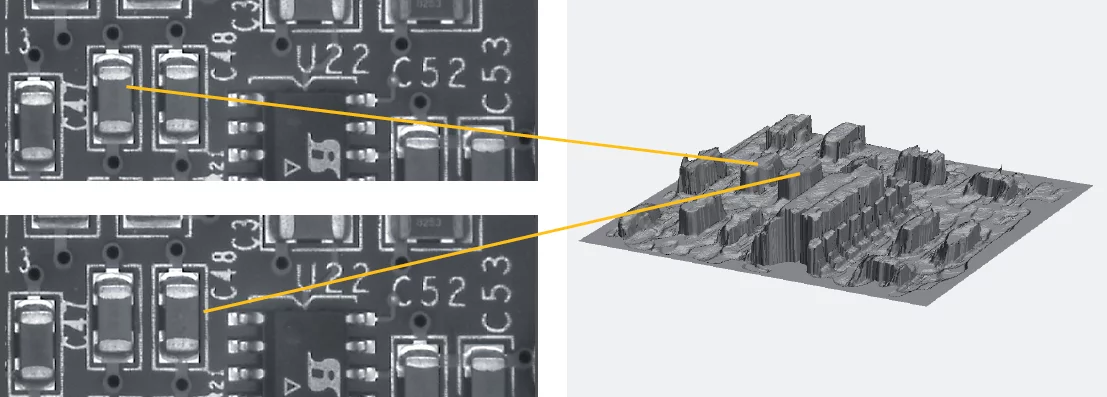
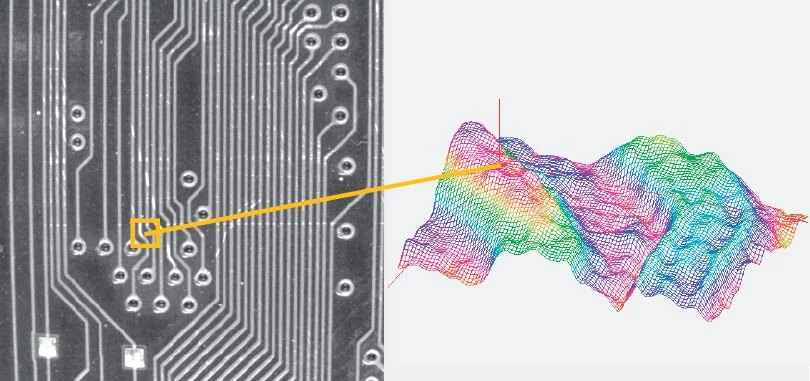
高度图 / Z-图
主动单目方法可以仅通过一台相机捕捉高度信息。这些方法通常被称为 2.5D 成像或 Z 图。
最常见的两种方法是:
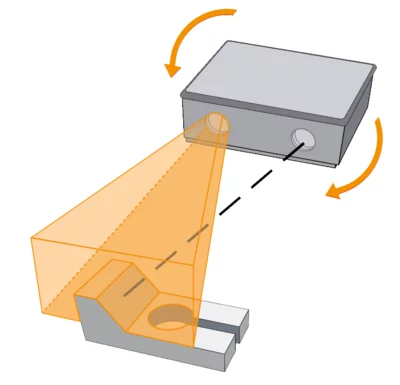
焦点深度 (DFF / 从焦点获取形状)通过分析每个像素的焦平面来确定距离数据。浅景深可以精确计算物体的距离。
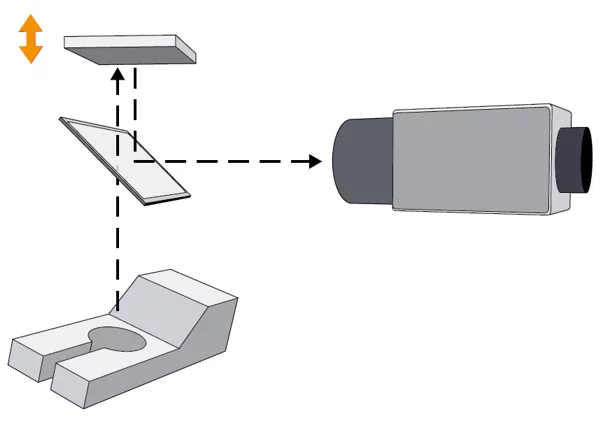
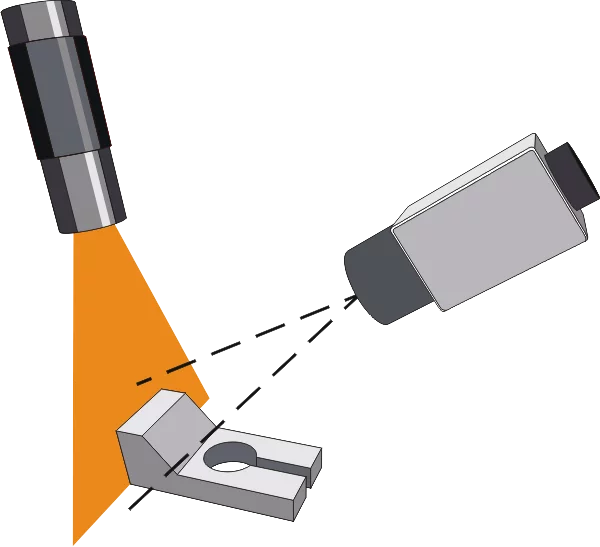
光条 (激光三角测量)通过重建投射到物体上的光线来计算物体的高度轮廓。
这些方法非常适合小物体或缺乏结构的物体的 3D 重建,通常用于质量控制或位置验证。
对于密集的高度图,软件提供附加工具,用于确定边缘、平面之间的角度,以及基于线条和点的 3D 测量。
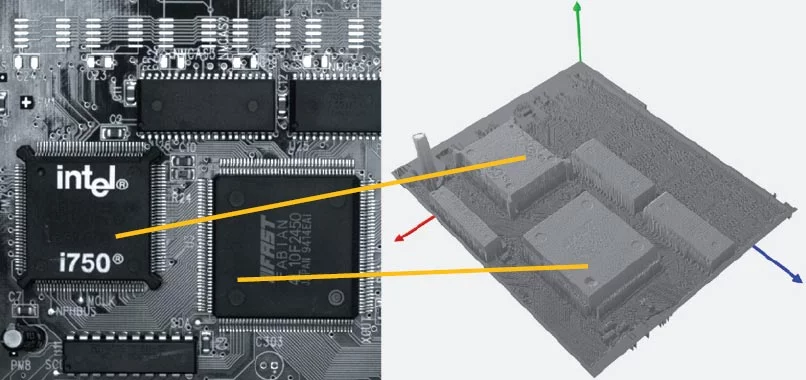
在 3D 注册中,多个不同视角的物体图像被合并为一个优化的整体形状(网格)。该方法对于重建复杂的几何形状至关重要,并为 3D 匹配、质量控制和位置确定奠定基础。
MVTec 软件提供平滑、下采样和三角化功能,以便将注册后的点云为后续比较或测量做最佳准备。
MVTec HALCON 中集成的表面融合技术将多个 3D 点云合并为一个水密的表面(无缝网格)。
这种技术,也叫做体积融合或 TSDF 融合,可以合并来自不同传感器的数据,如立体相机、飞行时间系统或条纹投影传感器(结构光)。它主要用于逆向工程和精确的表面分析。
我们的知识与服务
下载阅读我们的白皮书,获取工业机器视觉的实用洞察与专业知识,了解关键技术、行业趋势,以及可支持技术和战略决策的实际应用。
您想了解我们是否能为您的行业提供合适的解决方案吗?请将您的软件应用设计发送给我们,我们的专家将为您进行评估。