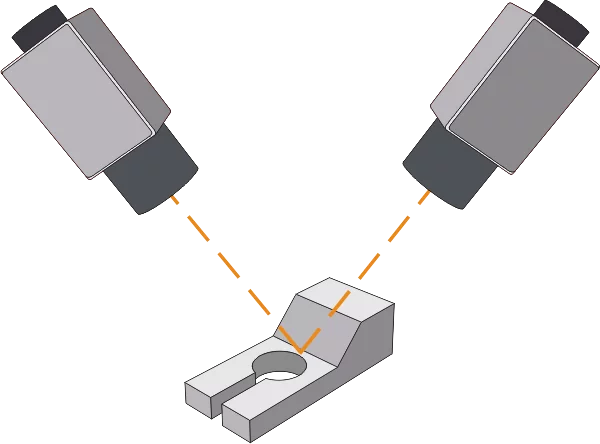
Binocular stereo vision / multi-view stereo
Stereo vision is used for 3D reconstruction and positioning of complex objects. It is particularly suited for structured surfaces of medium to large objects and is commonly used in quality control.
Stereo vision can also be used as a preprocessing step for 3D matching. The technology calculates 3D coordinates either through dense range images or using characteristic points and edges, making it ideal for precise measurements of elevations. The integrated hierarchical stereo interpolates 3D data in homogeneous areas, achieving especially high accuracy for small objects.
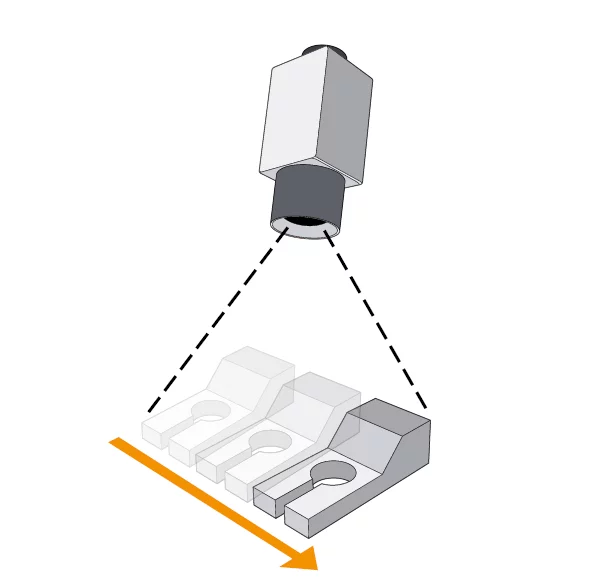
Height images / Z-maps
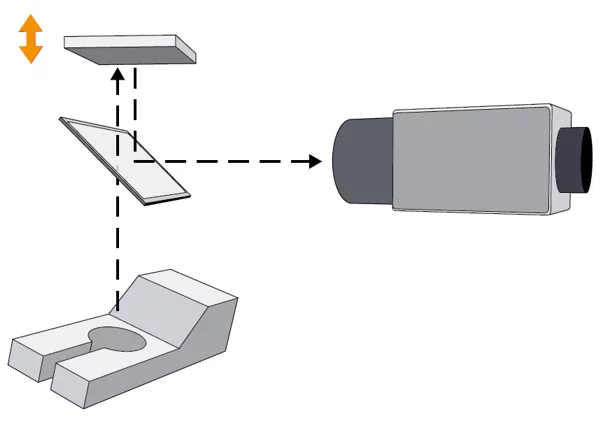
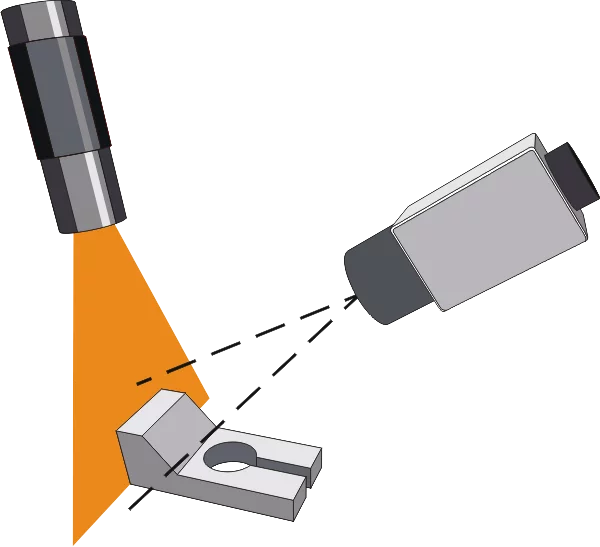
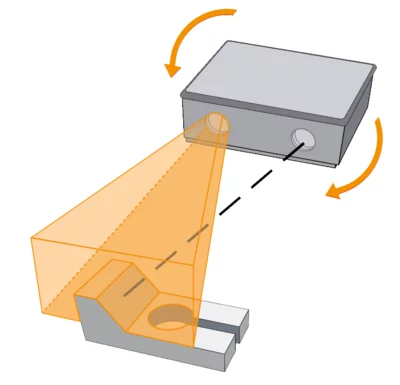
Active monocular methods enable the capture of height information with just one camera.
These approaches are often referred to as 2.5D imaging or Z-maps.
The two most common methods are:
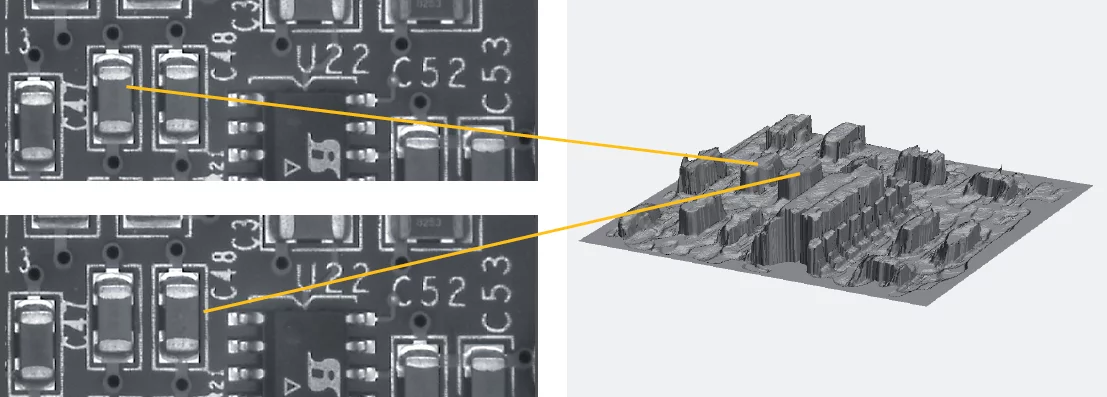
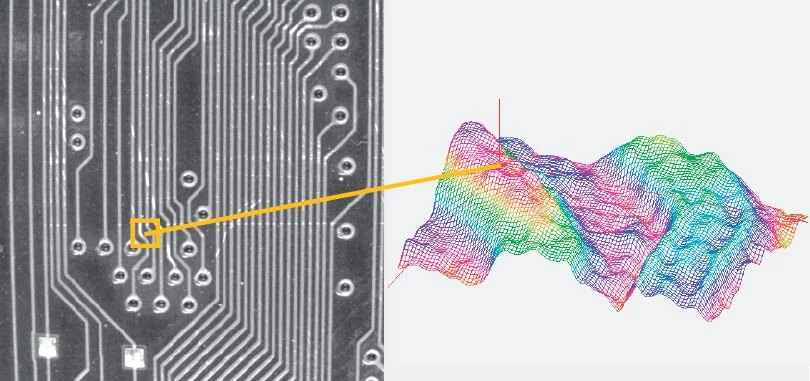
These methods are ideal for 3D reconstruction of small or structure-poor objects and are frequently used in quality control or position verification.
For dense height images, the software provides additional tools for determining edges, angles between planes, and for line- and point-based 3D measurements.
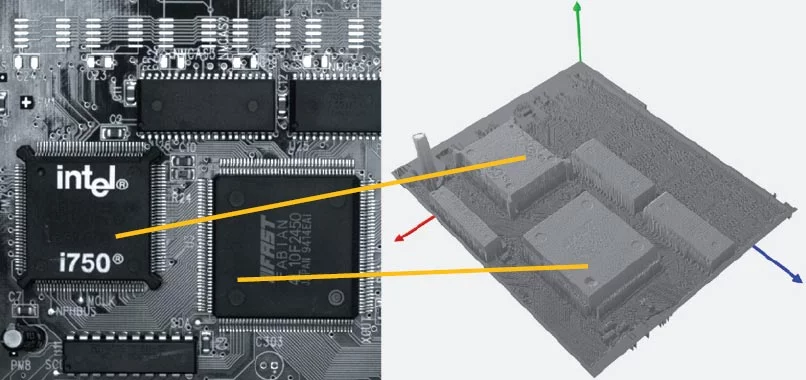
In 3D registration, multiple images of an object from different perspectives are merged into an optimized overall shape (mesh). This method is crucial for reconstructing complex geometries and forms the foundation for 3D matching, quality control, and position determination.
MVTec software provides functions for smoothing, sub-sampling, and triangulation to prepare the registered point clouds optimally for further comparison or measurement.
The surface fusion integrated in MVTec HALCON combines multiple 3D point clouds into a watertight surface (watertight mesh).
This technique, also known as volumetric fusion or TSDF fusion, can merge data from different sensors, such as stereo cameras, time-of-flight systems, or stripe projection sensors (structured light).
It is primarily used for reverse engineering and precise surface analysis.