3D Capture
The software processes 3D point clouds from common 3D sensors (e.g., time-of-flight, stripe projection, stereo systems).
Surface Geometry Analysis
The technology detects locally stable areas on the surface, such as flat or slightly convex zones.
Grippability Validation
Criteria like tilt, curvature, and local flatness are checked to identify secure gripping points.
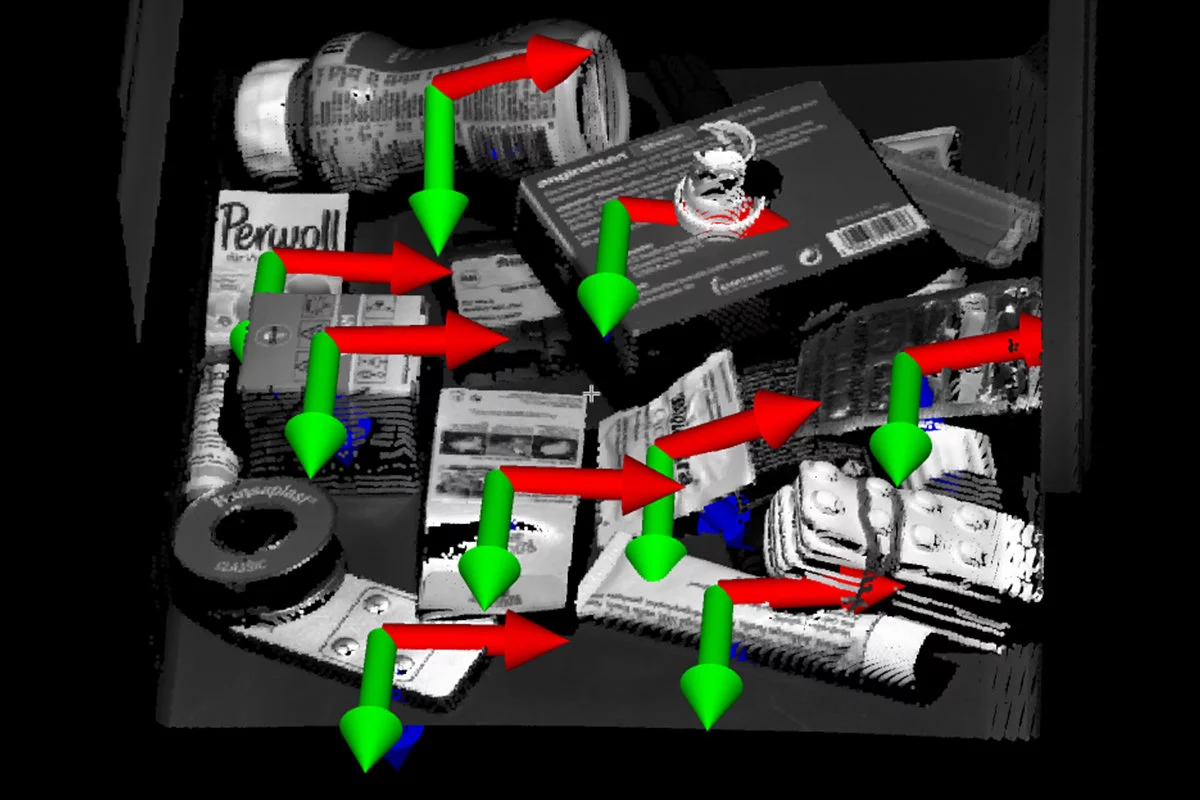
Output of Optimal Gripping Points
The software provides robust, collision-free coordinates for the robot – completely independent of CAD data.
MVTec offers several technologies for gripping and picking processes. The 3D Gripping Point Detection complements these methods ideally when objects are interchangeable, varied, or unknown.
| Technology | Application Area | Special Feature |
|---|---|---|
| Deep 3D Matching | Precise 3D localization of known objects | CAD-based or synthetically trainable, extremely robust |
| Shape-Based 3D Matching | 3D position determination via CAD models | Subpixel accurate positioning |
| Surface-Based 3D Matching | Using point clouds instead of CAD | Robust with missing edges |
| 3D Gripping Point Detection | Gripping points for suction cups on unknown objects | CAD-independent, highly flexible |