Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.
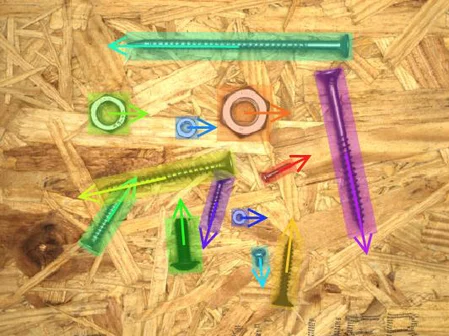
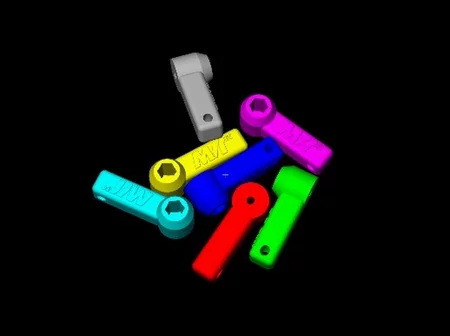
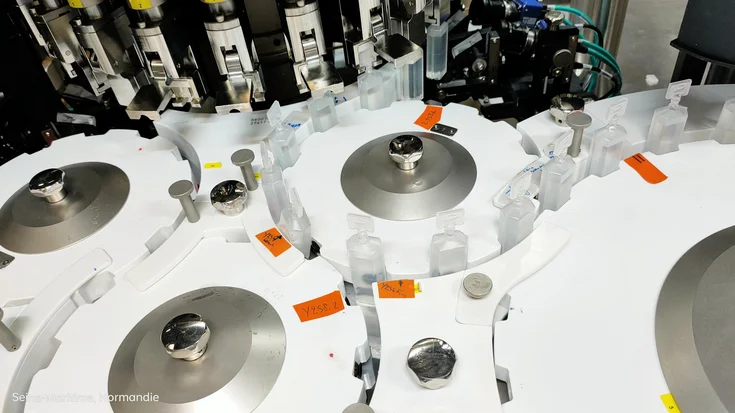
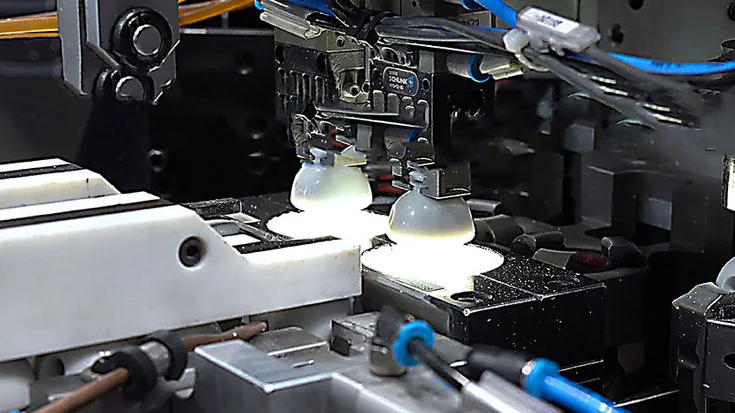
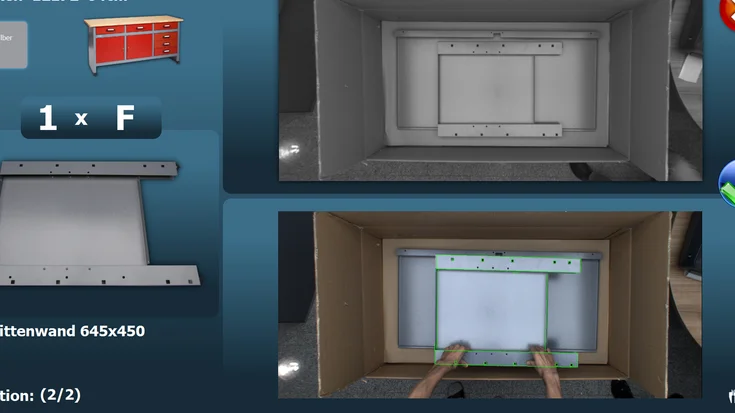
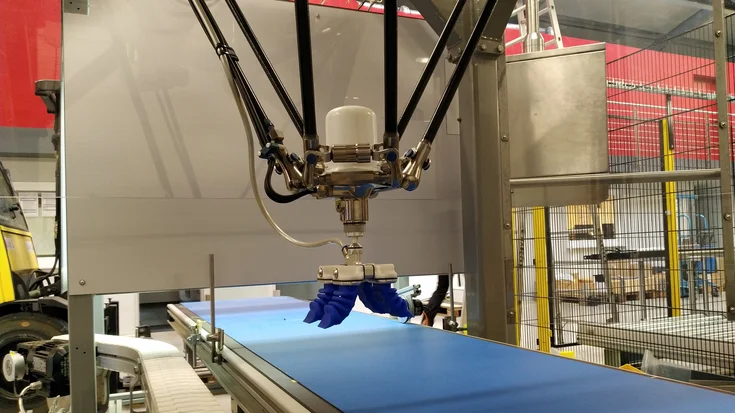
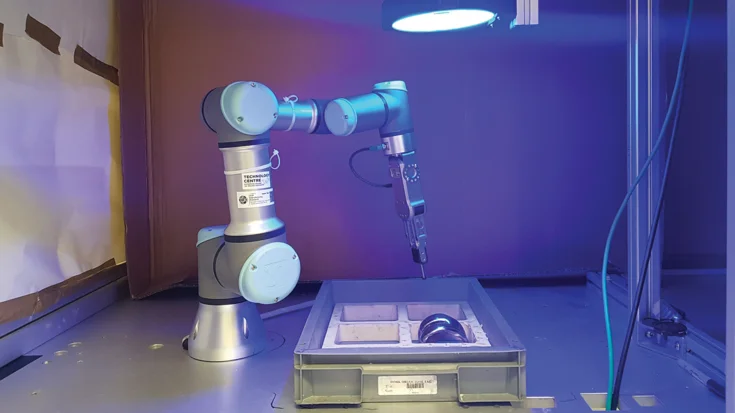
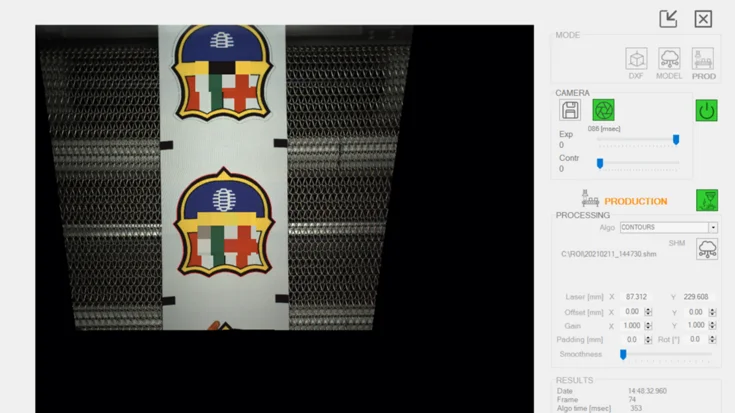
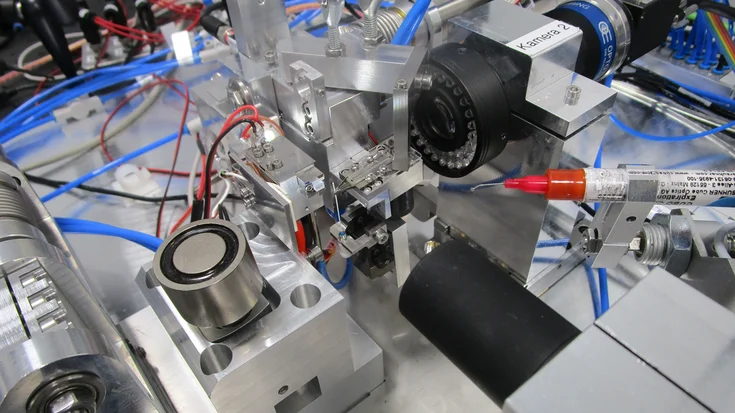
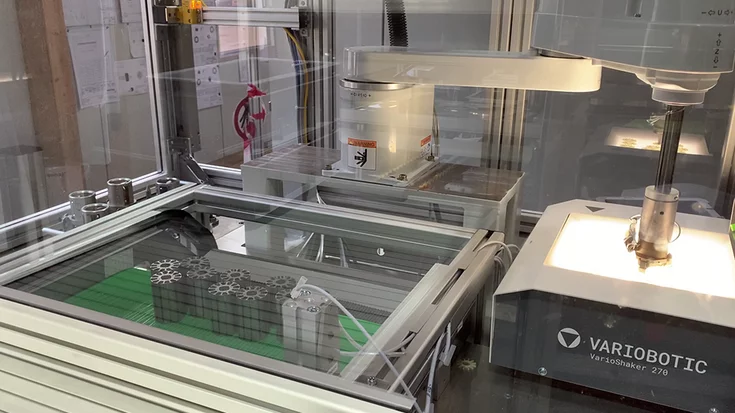
Activate Video3D matching is used across many industries. A key use case is pick & place: objects are located in 3D space, their 6D poses are determined (position and orientation), and robots use this information to grip and place them correctly. Another typical scenario is the detection of reference marks, which are used to align workpiece carriers or fixtures with very high accuracy before further processing.
Typical use cases are:
MATCHING APPLICATIONS