3D-Erfassung
Die Software verarbeitet 3D-Punktwolken von gängigen 3D-Sensoren (z. B. Time-of-Flight, Streifenprojektion, Stereo-Systeme).
Analyse der Oberflächengeometrie
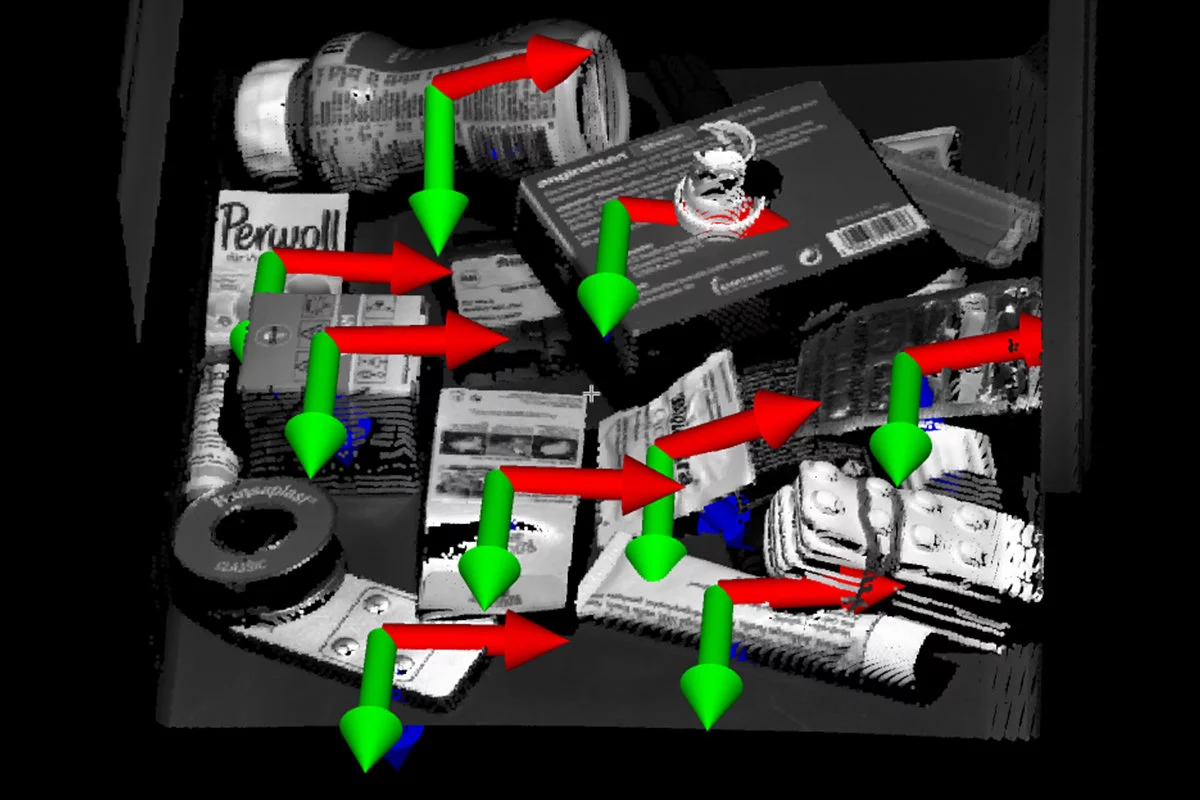
Die Technologie erkennt lokal stabile Bereiche auf der Oberfläche, etwa flache oder leicht konvexe Zonen.
Validierung der Greifbarkeit
Kriterien wie Neigung, Krümmung und lokale Ebenheit werden geprüft, um sichere Sauggreifer-Punkte zu identifizieren.
Ausgabe optimaler Greifpunkte
Die Software liefert robuste, kollisionsfreie Koordinaten für den Roboter – vollständig unabhängig von CAD-Daten.
Keine CAD-Daten erforderlich.
Schnell integrierbar, minimaler Setup-Aufwand.
Robust gegenüber Objektvariation, Reflexionen und chaotischen Lagen.
Ideal für flexible Pick & Place-, Logistik- und Bin-Picking-Anwendungen.
Funktioniert auf handelsüblichen 3D-Sensoren.
Skalierbar für Edge-, Sensor- und Robotik-Setups.
MVTec bietet mehrere Technologien für Greif- und Pick-and-Place-Prozesse. Die 3D Gripping Point Detection ergänzt diese Methoden ideal, wenn Objekte austauschbar, vielfältig oder unbekannt sind.
| Technologie | Einsatzgebiet | Besonderheit |
|---|---|---|
| Deep 3D Matching | Präzise 3D-Lokalisierung bekannter Objekte | CAD-basiert oder synthetisch trainierbar, extrem robust |
| Formbasiertes 3D-Matching | 3D-Lagebestimmung über CAD-Modelle | Subpixelgenaue Positionierung |
| Oberflächenbasiertes 3D-Matching | Nutzung von Punktwolken statt CAD | Robust bei fehlenden Kanten |
| 3D Gripping Point Detection | Greifpunkte für Sauger auf unbekannten Objekten | CAD-unabhängig, sehr flexibel |