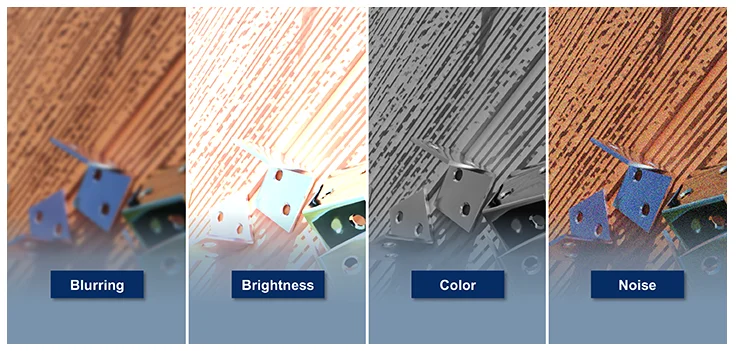
Deep 3D-Matching kombiniert Deep-Learning-Algorithmen mit regelbasierten Verfahren und ermöglicht eine besonders schnelle und robuste Objekterkennung auf Basis von 2D-Bildern.
Da die Methode nur eine minimale Parametrisierung erfordert, eignet sie sich ideal für industrielle Szenarien – auch unter schwierigen Bedingungen wie variierenden Hintergründen, unterschiedlichen Materialien oder teilweiser Verdeckung.
Bin-Picking in der Metallverarbeitung und Intralogistik.
Robotergestützte Qualitätsprüfung in der Automobilindustrie.
Objekterkennung mit CAD-Modellen in variantenreichen Fertigungen.
Flexible Roboterführung durch kamerabasierte Lageerkennung.
Das Training basiert auf synthetisch erzeugten Bilddaten (Synthetic Data), die aus vorhandenen CAD-Modellen automatisch generiert werden.
Dies spart Kosten und Zeit, da kein manuelles Labeling nötig ist.
MVTec-Software bietet sowohl formbasiertes als auch oberflächenbasiertes 3D-Matching an.
Beide Methoden ergänzen sich und sind für unterschiedliche Szenarien optimiert:
Formbasiertes 3D-Matching
Verwendet mehrere 2D-Ansichten eines bekannten Objekts, das durch ein CAD-Modell repräsentiert wird. So wird die 3D-Lage anhand der Objektform bestimmt.
Oberflächenbasiertes 3D-Matching
Kombiniert Punktwolken (Point Clouds) mit Abstandsbildern (Range Images) und erkennt Objekte zuverlässig – selbst bei glatten oder strukturlosen Oberflächen.
Beide Verfahren ermöglichen eine Feinjustierung der Objektlage und werden häufig in der Qualitätsprüfung, Robotik und automatisierten Montageprozessen eingesetzt.

Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Datenschutzerklärung.
Video aktivieren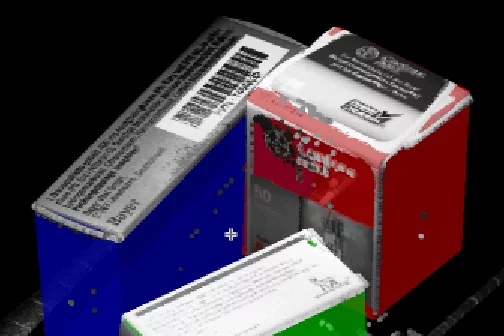
Der Generische Box Finder erkennt Boxen unterschiedlicher Größe in einem definierten Raum – ganz ohne vorheriges Modelltraining.
Dadurch eignet sich die Technologie besonders für Logistik- und Pharma-Anwendungen, in denen Verpackungen variabler Größe verarbeitet werden.
Weitere Einsatzmöglichkeiten sind das Messen geometrischer Eigenschaften oder die Lokalisierung von Defekten an komplexen 3D-Objekten nach einem 3D-Alignment.
Das 3D-Matching ermöglicht die präzise Lokalisierung von Objekten im Raum.
Dabei werden Position und Orientierung (6D Pose) exakt berechnet.
Diese Daten können direkt in Robotik-Anwendungen genutzt werden, z. B. zur Steuerung eines Robotergreifers oder zur automatischen Qualitätsprüfung.

Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Datenschutzerklärung.
Video aktivieren