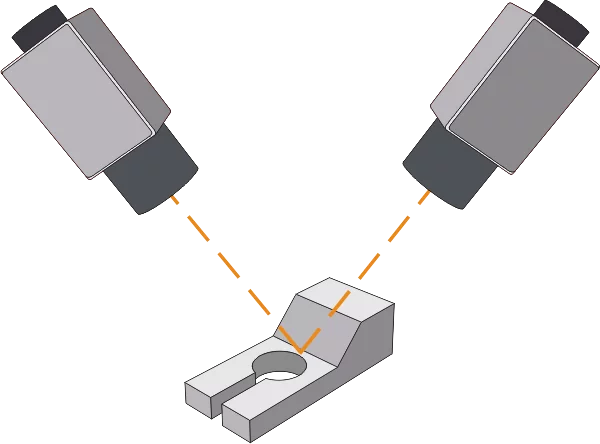
Binokulare Stereo-Vision / Multi-View Stereo
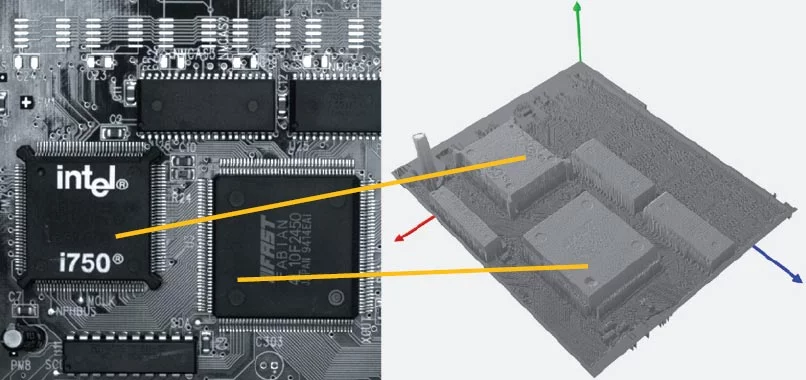
Stereo-Vision dient der 3D-Rekonstruktion und Positionsbestimmung komplexer Objekte.
Sie eignet sich besonders für strukturierte Oberflächen mittlerer bis großer Objekte und wird häufig in der Qualitätskontrolle eingesetzt.
Stereo-Vision kann auch als Vorverarbeitung für das 3D-Matching genutzt werden. Die Technologie berechnet 3D-Koordinaten entweder durch dichte Entfernungsbilder (range images) oder anhand charakteristischer Punkte und Kanten, was sie ideal für präzise Messungen von Erhebungen macht. Das integrierte Mehrgitter-Stereo (hierarchical stereo) interpoliert 3D-Daten in homogenen Bereichen und erzielt besonders hohe Genauigkeit bei kleinen Objekten.
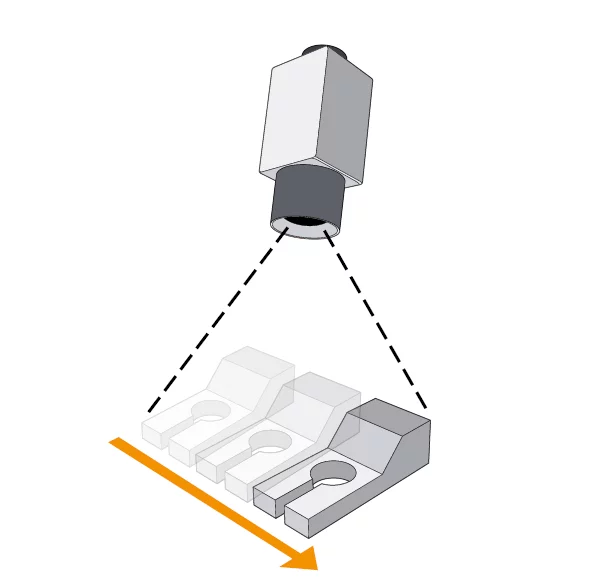
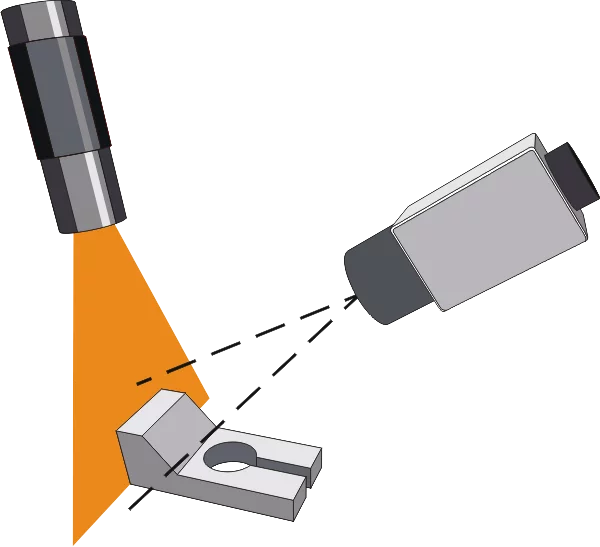
Mit Höhenbildern / Height Images, Z-Maps
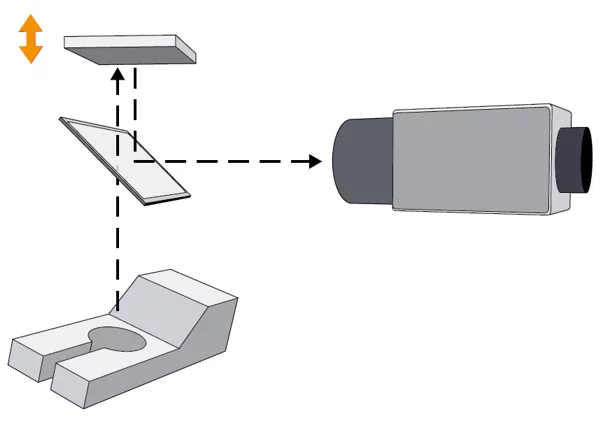
Aktive monokulare Verfahren ermöglichen die Erfassung von Höheninformationen mit nur einer Kamera.
Diese Ansätze werden häufig als 2.5D imaging oder Z-Maps bezeichnet.
Die beiden gängigsten Methoden sind:
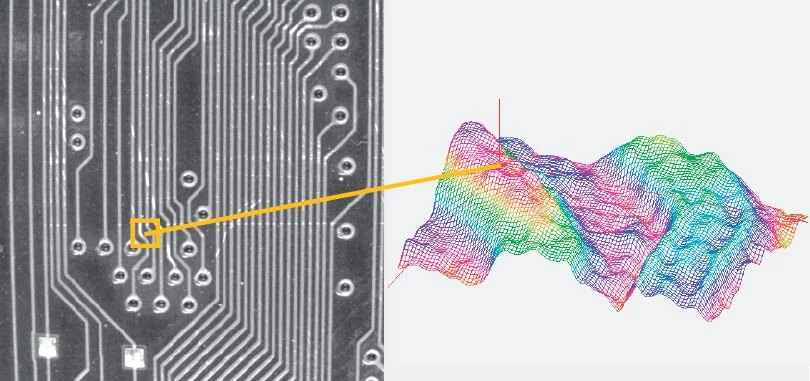
Diese Verfahren sind ideal für die 3D-Rekonstruktion kleiner oder strukturarmer Objekte und werden häufig in der Qualitätskontrolle oder Positionsprüfung eingesetzt.
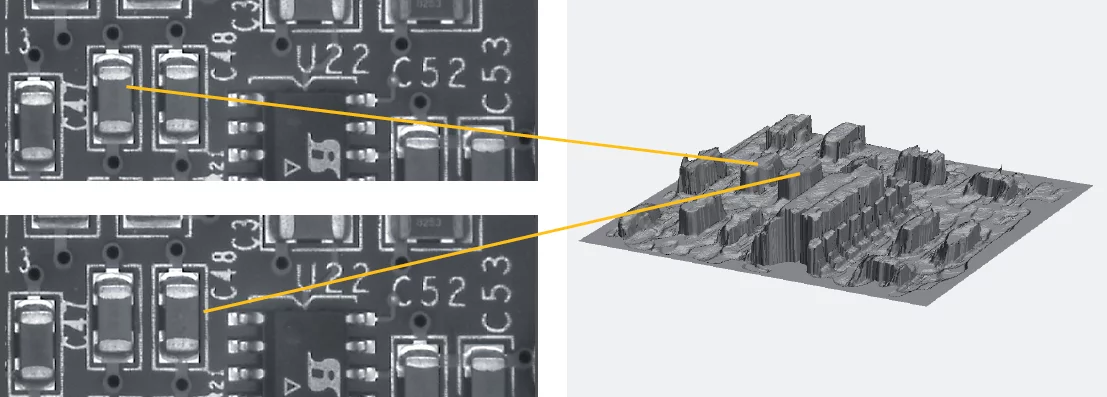
Für dichte Höhenbilder bietet die Software zusätzliche Werkzeuge zur Bestimmung von Kanten, Winkeln zwischen Ebenen sowie für linien- und punktbasierte 3D-Messungen.
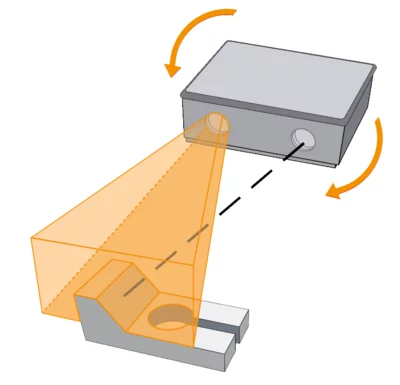
Bei der 3D-Registrierung werden mehrere Aufnahmen eines Objekts aus verschiedenen Perspektiven zu einer optimierten Gesamtform (mesh) zusammengeführt.
Die Methode ist entscheidend für die Rekonstruktion komplexer Geometrien und bildet die Grundlage für 3D-Matching, Qualitätskontrolle und Positionsbestimmung.
MVTec-Software bietet Funktionen für Glättung, Unterabtastung (sub-sampling) und Triangulation, um die registrierten Punktwolken optimal für den weiteren Vergleich oder die Vermessung vorzubereiten.
Die in MVTec HALCON integrierte Oberflächenfusion (surface fusion) kombiniert mehrere 3D-Punktwolken zu einer wasserdichten Oberfläche (watertight mesh).
Diese Technik – auch bekannt als volumetric fusion oder TSDF fusion – kann Daten unterschiedlicher Sensoren zusammenführen, etwa aus Stereo-Kameras, Time-of-Flight-Systemen oder Streifenprojektionssensoren (structured light).
Sie wird vor allem für Reverse Engineering und präzise Oberflächenanalysen eingesetzt.