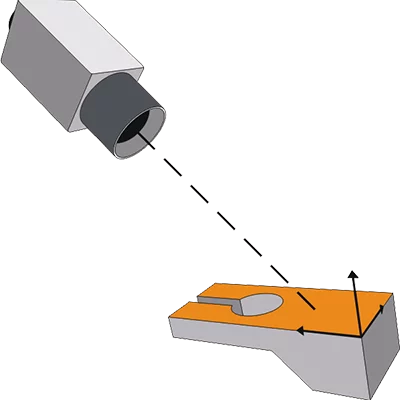
MVTec 使用视角匹配技术,通过平面子区域确定物体的 3D 位置。该技术不需要完整的 3D 形状模型,只需一台相机。
软件在定义的 ROI 内评估物体的平面区域。从该区域在相机图像中的投影中,软件计算物体在空间中的 3D 位置(位置和朝向)。该模型通过训练物体的模式图像来创建。该模式表示用于匹配的物体相关平面部分。
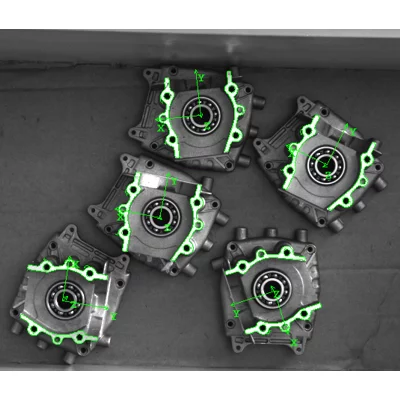
视角匹配被广泛用于在无需创建完整 3D 模型的情况下精确确定物体的 3D 位置。这使得机器人抓取操作和测量过程可以更加稳健和高效地自动化。
组件的 3D 对齐,适用于装配和检查过程。机器视觉中的拾取与放置应用。机器人进行的“料箱拣选”。汽车和机器人领域的应用。完成 3D 对齐后的复杂 3D 物体测量任务,如位置或距离检查。
组件的 3D 对齐,适用于装配和检查过程。
机器视觉中的拾取与放置应用。
机器人进行的“料箱拣选”。
汽车和机器人领域的应用。
完成 3D 对齐后的复杂 3D 物体测量任务,如位置或距离检查。
MVTec 提供了两种互补的视角匹配方法,分别针对物体形状和外观:
可变形匹配(视角可变形匹配):使用基于形状的匹配技术。软件主要关注物体的边缘,并能够补偿视角畸变和轻微形变。
基于描述符的匹配:使用图像中的“关键点”(特征点)。这些点通过其局部环境进行描述,即使视角或光照条件发生变化,仍能可靠地进行识别。
在这两种情况下,物体可以仅使用一台相机可靠地定位,推导出其 3D 位置。这减少了硬件需求,简化了集成,并为灵活的 3D 视觉解决方案提供了可能。
我们的知识与服务
下载阅读我们的白皮书,获取工业机器视觉的实用洞察与专业知识,了解关键技术、行业趋势,以及可支持技术和战略决策的实际应用。
您想了解我们是否能为您的行业提供合适的解决方案吗?请将您的软件应用设计发送给我们,我们的专家将为您进行评估。