Success Story
Aufgrund der sehr hohen Komplexität sind Pick-&-Place-Systeme nur mit Fachwissen einzurichten und umzurüsten. Bei einem Bauteilwechsel ist z.B. immer Expertise im Bereich Bildverarbeitung und Robotik erforderlich. Dadurch entstehen oft hohe Folgekosten. Unternehmen überlegen sich also lieber zweimal, ob sie eine Pick-&-Place-Anwendung einführen sollten.
Attentra hat diese Probleme mit der Einführung von EligoPart, ein Roboter-Kamerasystem für Standard-Pick-&-Place-Anwendungen, gelöst. Es ermöglicht die automatische Kalibrierung der Kamera und der Bauteile sowie die Hand-Auge-Kalilbrierung von Kamera und Roboter. Pick-&-Place-Anwendungen können somit schnell und einfach realisiert sowie auch angepasst werden, ohne Fachntnisse in der Bildverarbeitung und Robotik.
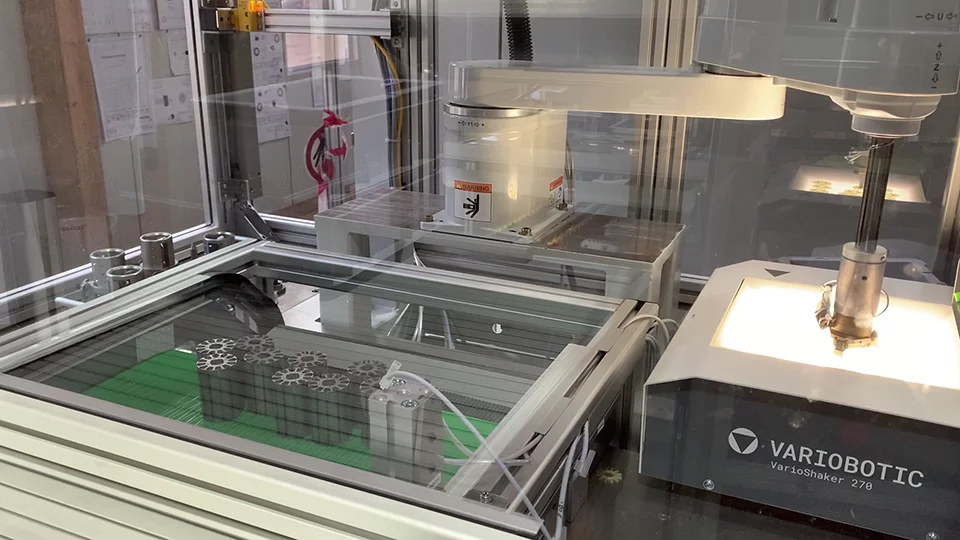
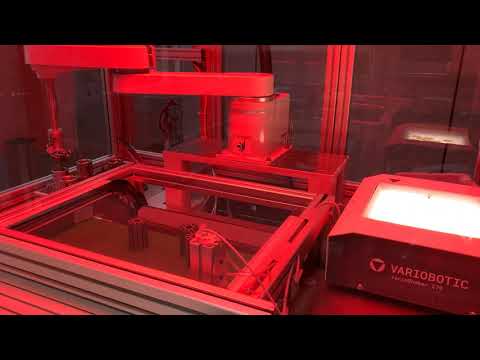
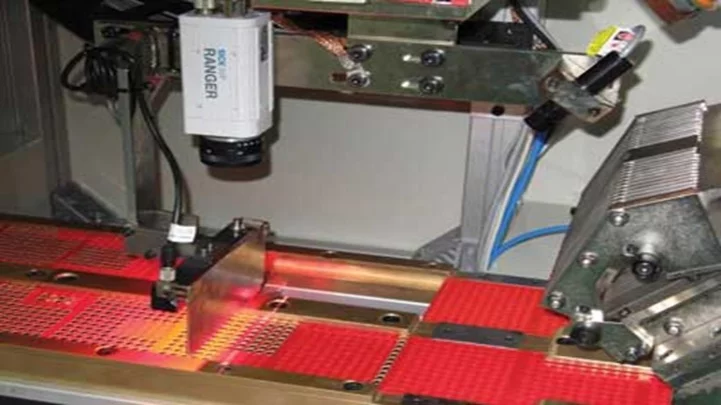
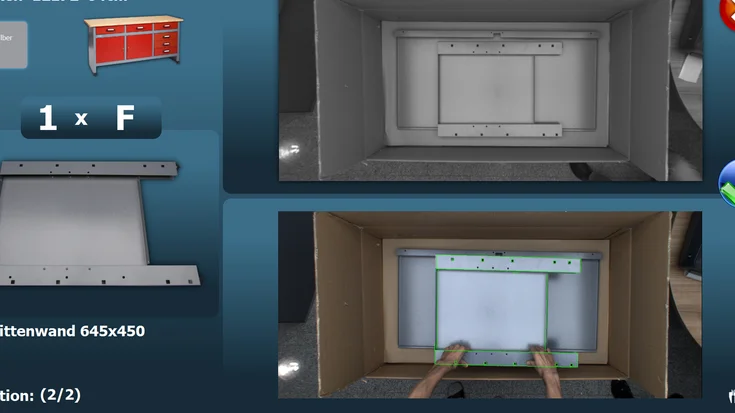
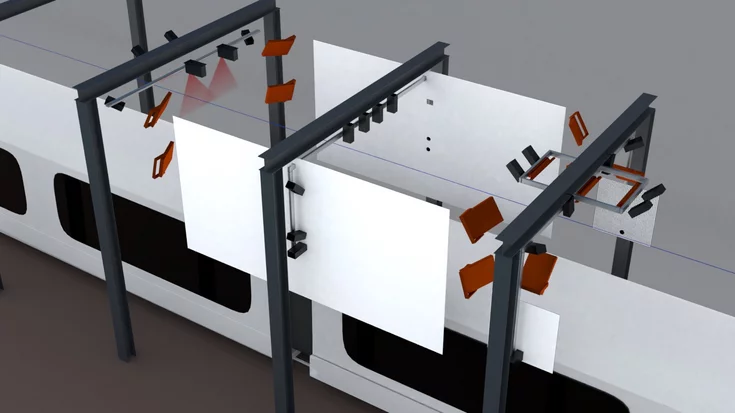
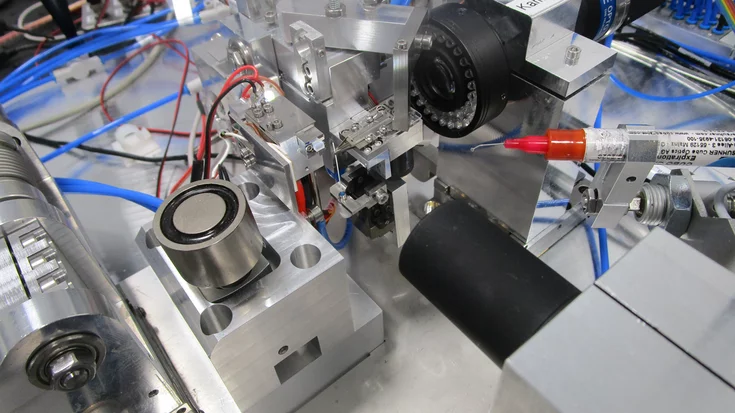
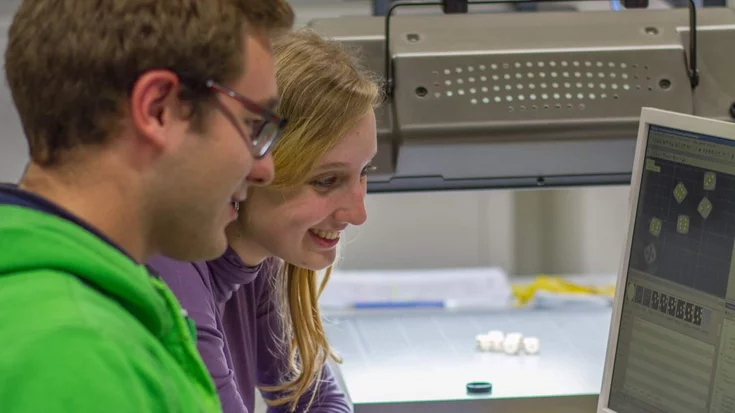
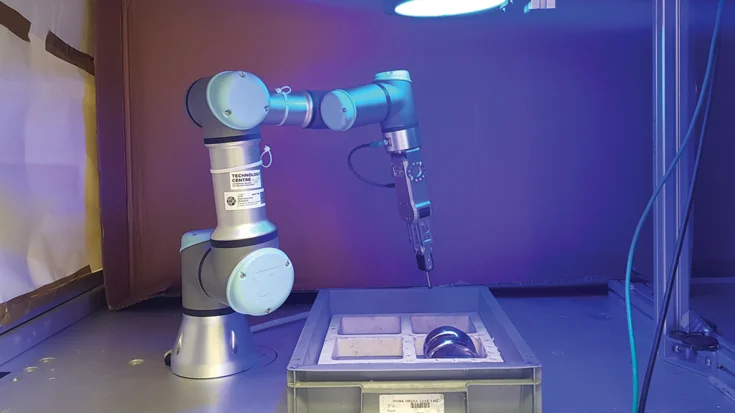
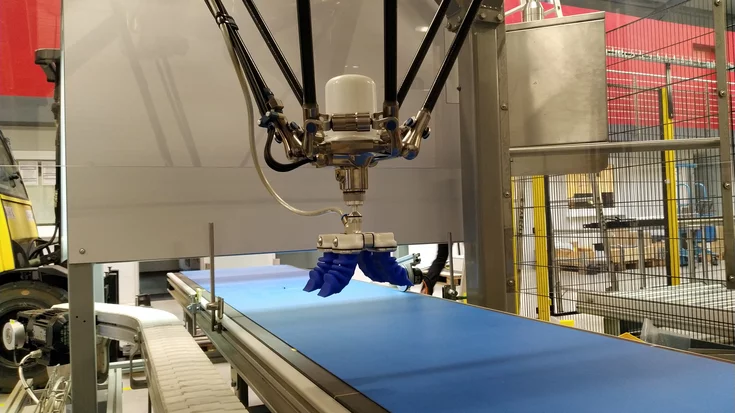
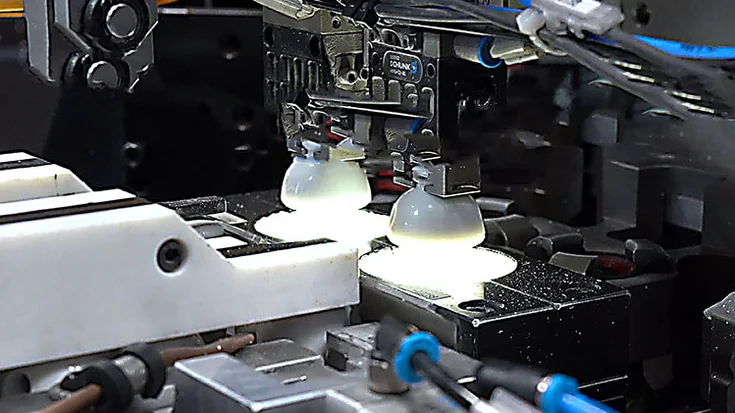
In a production cell at the customer Festool, star-shaped insulators, so-called end stars, are picked up by a SCARA robot and attached to armature packs. The end stars are placed between the armature packs, which later form the rotating core of an electric motor.
In addition, an EligoPart system with two cameras is installed: a 10MPx camera and a high-resolution 20MPx camera. Both are hand-eye In einer Produktionszelle beim Kunden Festool werden sternförmige Isolatoren, sogenannte Endsterne, von einem SCARA-Roboter aufgenommen und auf Ankerpakete angebracht. Die Endsterne werden zwischen die Ankerpakete gesetzt, die später den rotierenden Kern eines Elektromotors bilden.
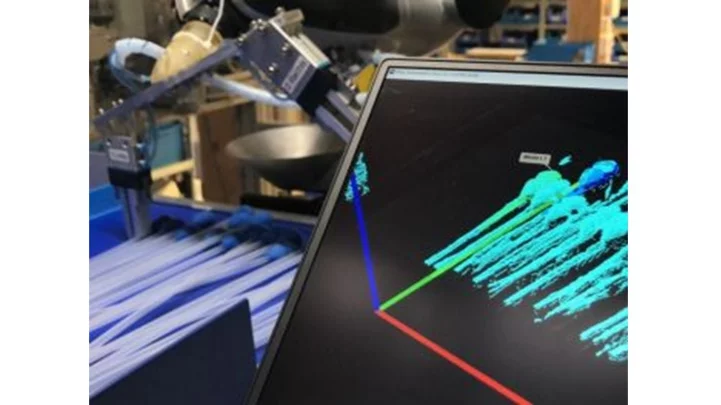
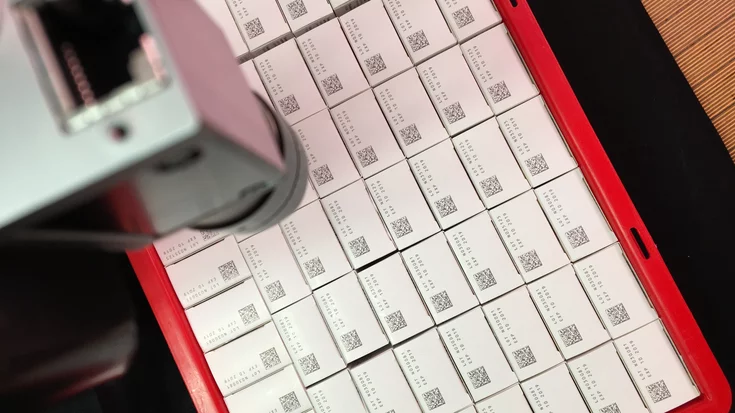
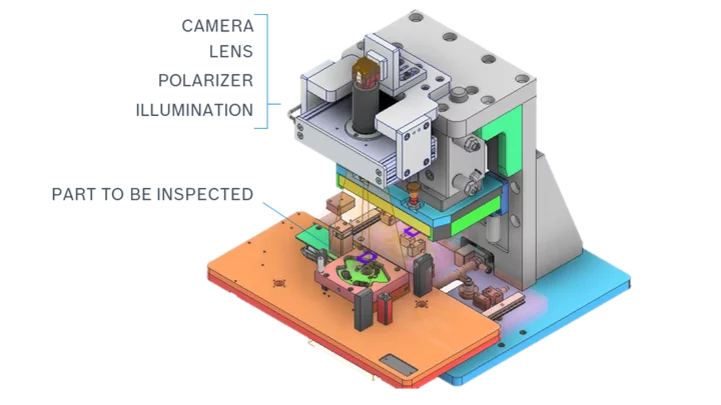
Dazu ist ein EligoPart-System mit zwei Kameras installiert: eine 10MPx-Kamera und eine hochauflösende 20MPx-Kamera. Beide sind für die notwendige Genauigkeit Hand-Auge-kalibriert. Die Endsterne werden einer Vereinzelung im Shaker zugeführt. Die Ankerpakete laufen über ein Förderband unter die zweite Kamera. Vom SCARA-Roboter aus werden über eine TCP-Verbindung je nach Zykluszustand die Bildverarbeitungsabläufe an Kamera 1 oder 2 gestartet, um einen Endstern auf der Shakerfläche oder ein Ankerpaket auf dem Förderband zu detektieren.
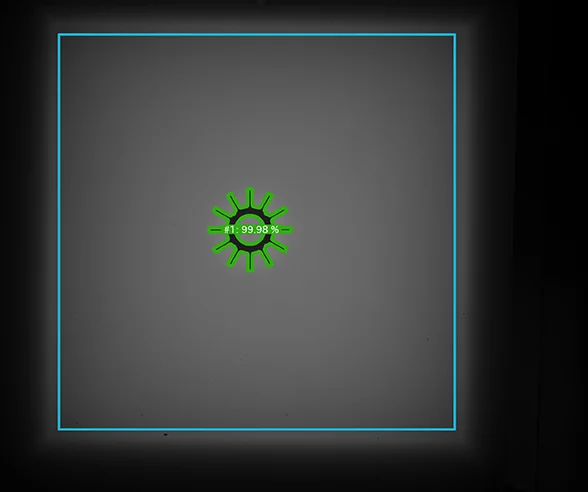
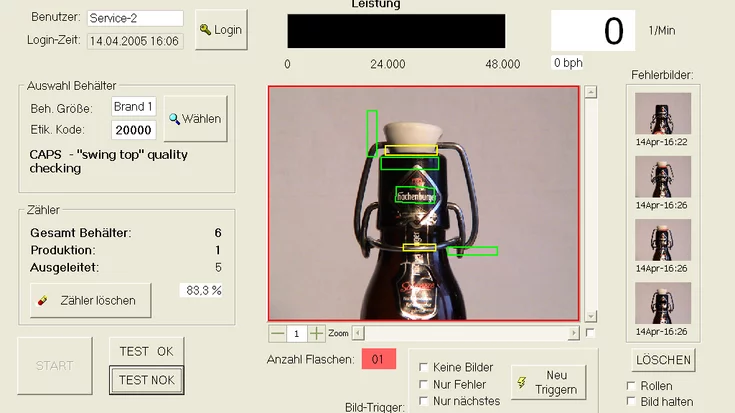
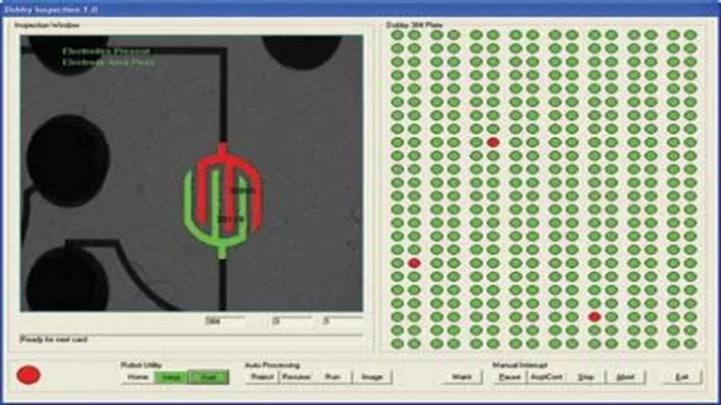
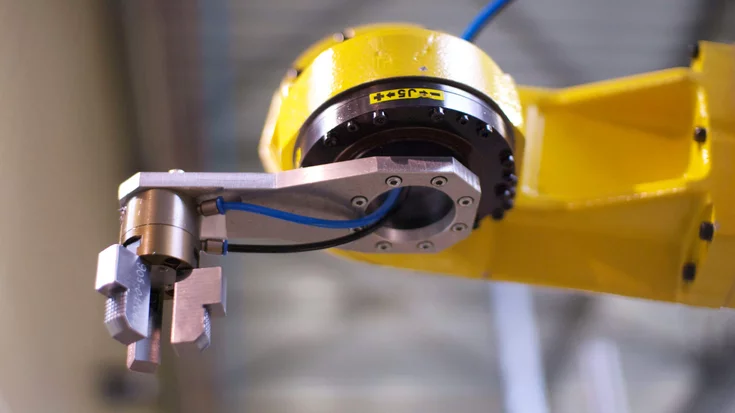
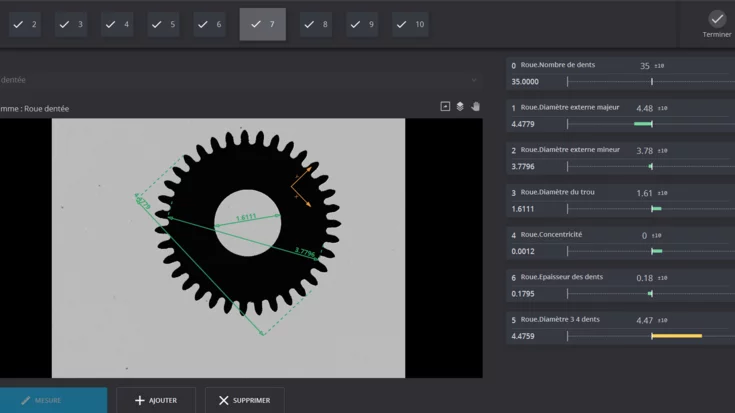
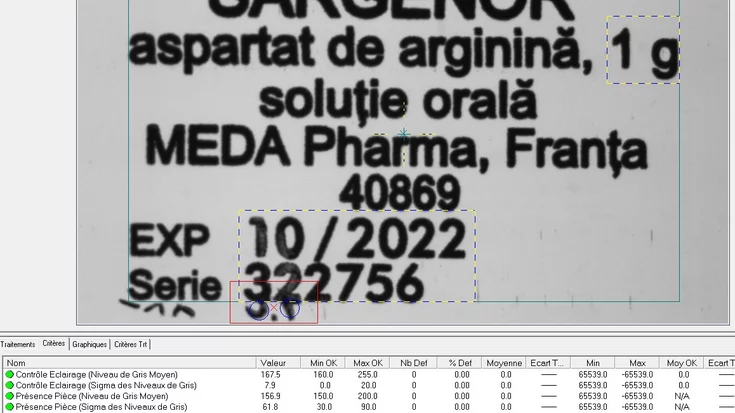
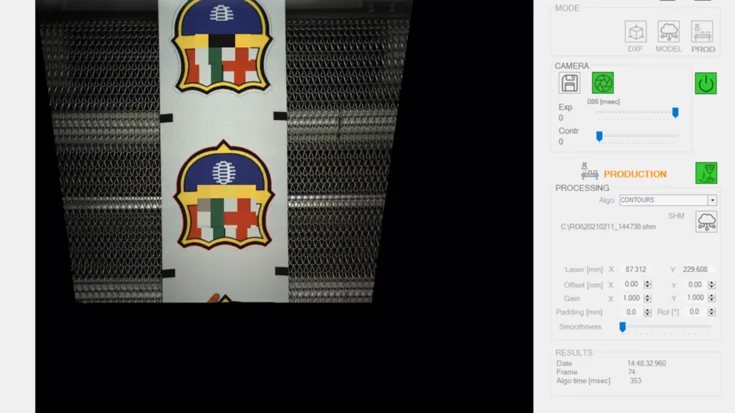
Der EligoPart-Controller steuert dabei mittels der RobotVisionCenter-Software die Bildaufnahme an der entsprechenden Kamera unter bauteilspezifischen Parametern. Die mit der Bildverarbeitungssoftware MVTec HALCON entwickelte Bauteil-Detektion wird auf dem aufgenommenen Bild ausgeführt. Die RobotVisionCenter-Software bereitet die Ergebnisse auf und sendet die Abgreifpositionen per TCP an den SCARA-Roboter zurück, der die Teile somit direkt anfahren und greifen kann. In einer Fügestation werden die Ankerpakete dann nacheinander in mehreren Ablagepositionen mit den Isolationsscheiben zusammengeführt.
“Die Vielfalt der in der HALCON Toolbox enthaltenen Module versetzt uns in die Lage, die an uns gestellten Herausforderungen zu lösen.” (Roland Loy, Geschäftsführer, Attentra GmbH)
Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Datenschutzerklärung.
Video aktivieren





































![[Translate to German:] Warehouse where cheese wheels age during the ripening process](https://www.mvtec.com/fileadmin/_processed_/1/d/csm_success_story_mvtec_eberle_2_673d7c329f.webp "[Translate to German:] Cheese Warehouse with Stored Cheese Wheels")