成功案例
拾取和放置系统非常复杂,只有具备专业知识才能建立和转换。例如,如果要更换组件,必须要有图像处理和机器人方面的专业知识。这往往导致后续费用十分高昂。因此,企业在引入拾取和放置应用之前,经常会三思而后行。
Attentra 通过推出 EligoPart 解决了这些问题,这是一种用于标准拾取和放置应用的机器人相机系统。它可以实现相机和组件的自动标定,以及相机和机器人的手眼标定。如此一来,无需机器视觉和机器人技术方面的专业知识,也可以快速、轻松地实现并调整拾取和放置应用。
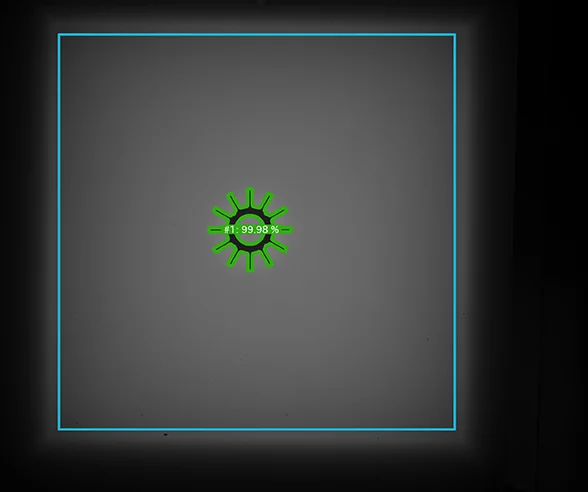
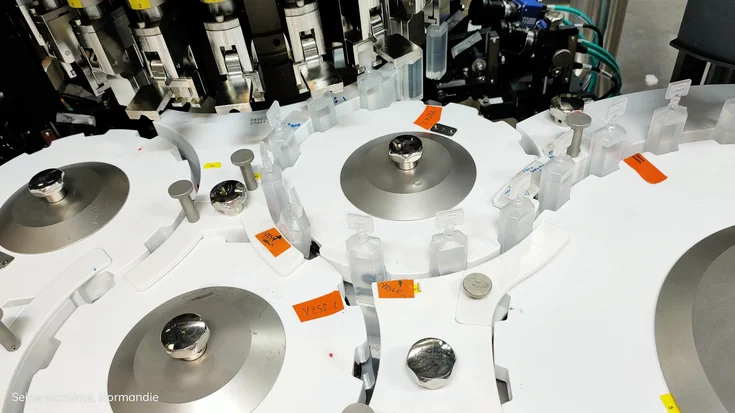
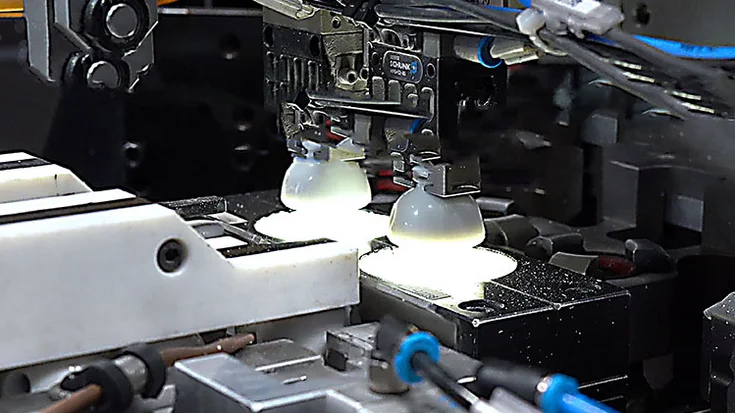
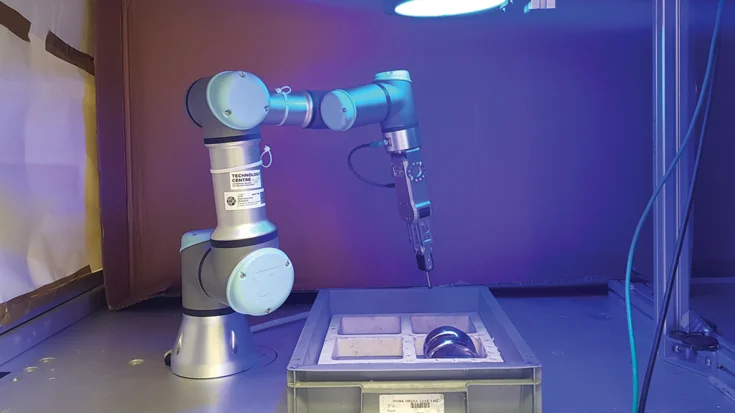
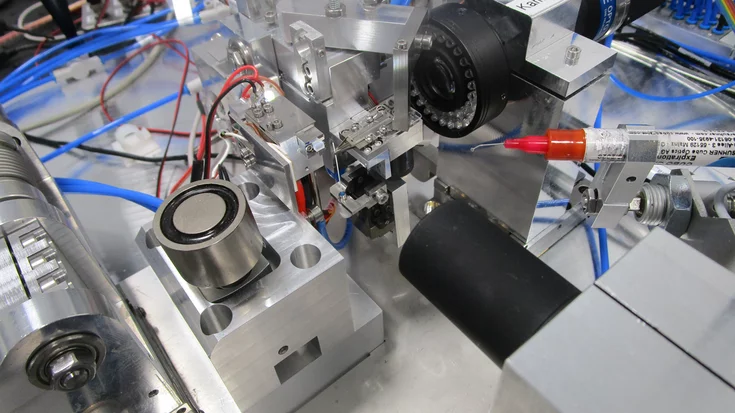
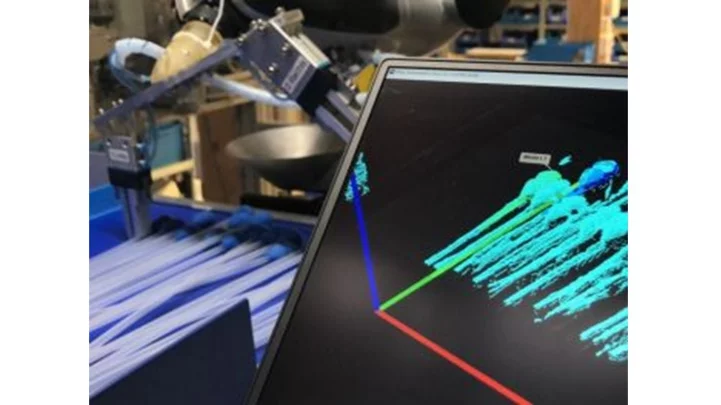
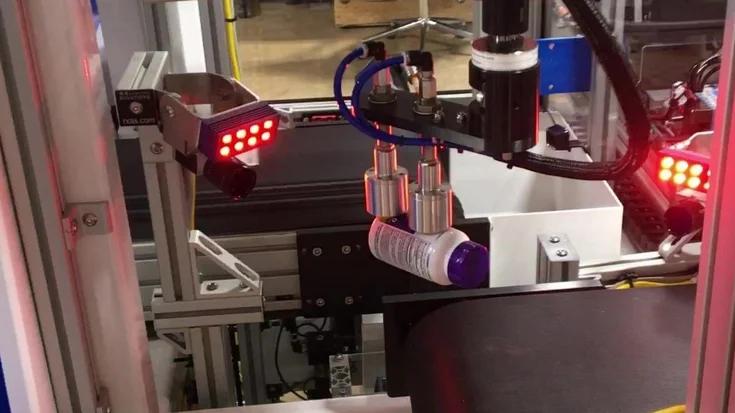
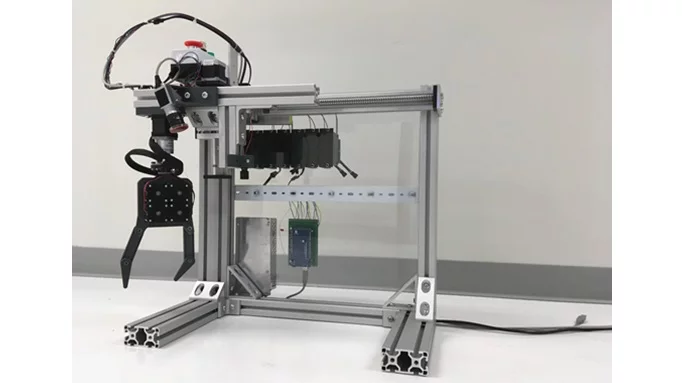
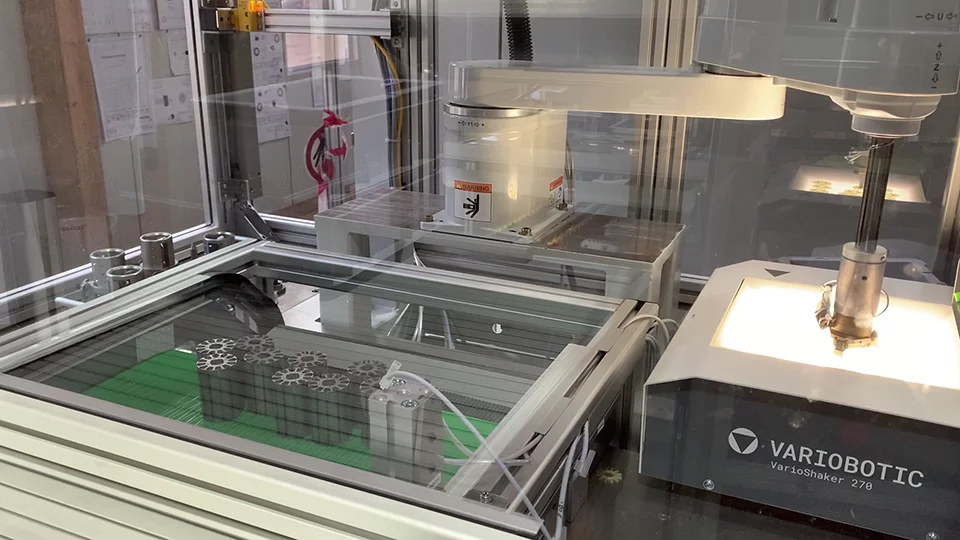
在客户 Festool 的生产单元中,SCARA 机器人将星形绝缘体(称为端星)拾起并固定到电枢套件上。端星放置在电枢套件之间,这些电枢套件后面会形成电动机的旋转核心。
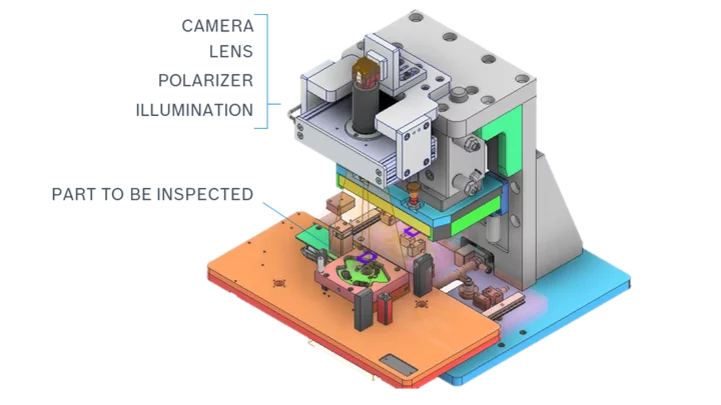
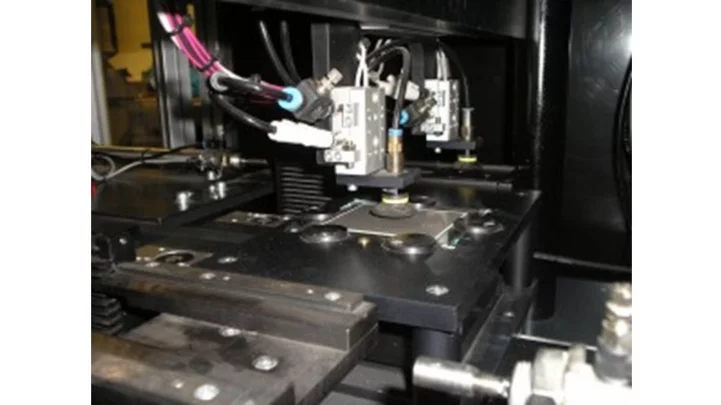
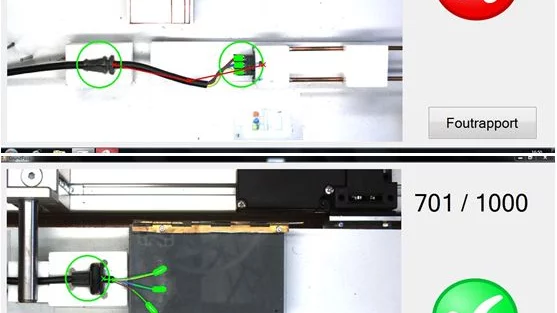
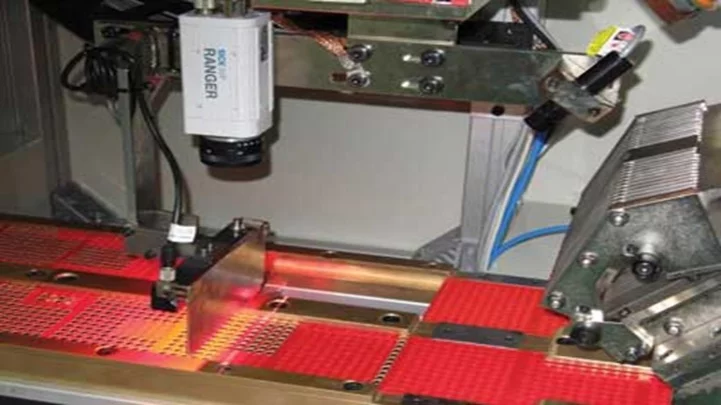
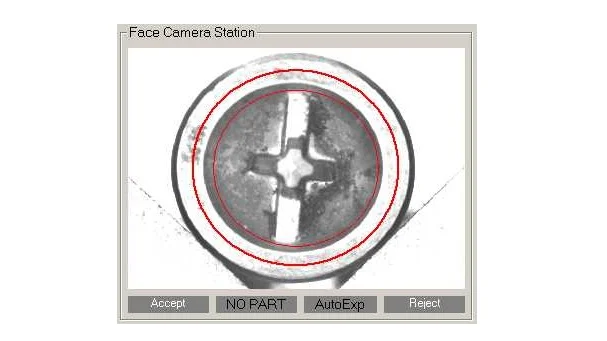
此外,还安装了一套带有两台相机的 EligoPart 系统:一台 1000 万像素相机和一台 2000 万像素高分辨率相机。两台相机均经过手眼标定,具备必要的精准度。最后的端星被送入振动筛中的分离器。锚点包装通过传送带从第二台相机下通过。从 SCARA 机器人处,通过 TCP 连接在相机 1 或 2 上启动图像处理序列,具体取决于周期状态,以检测振动筛表面上的端星或传送带上的锚点包装。
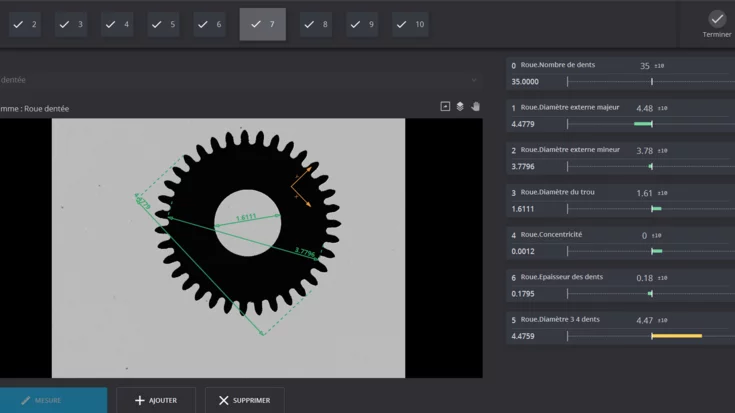
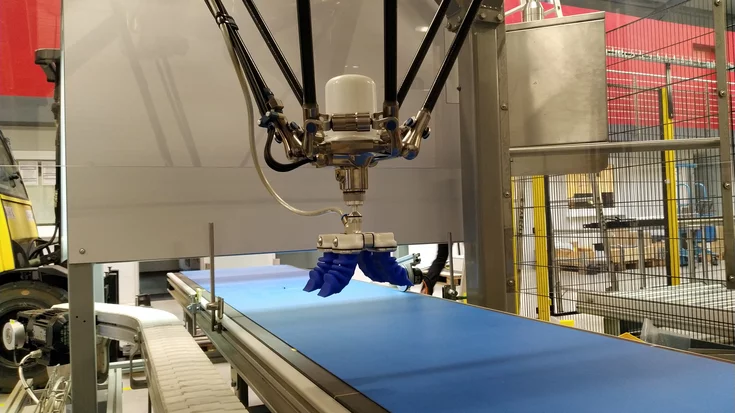
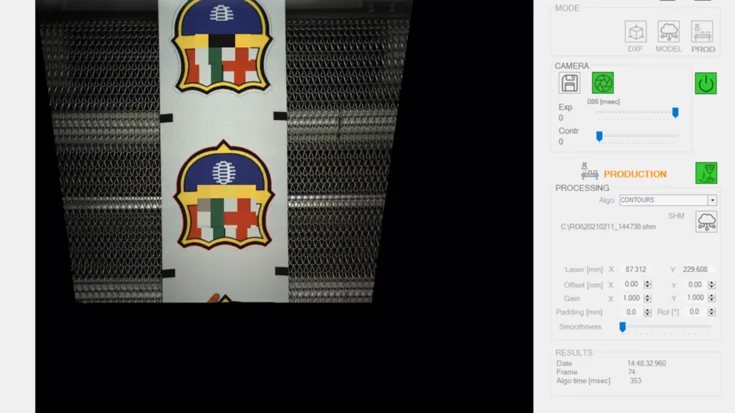
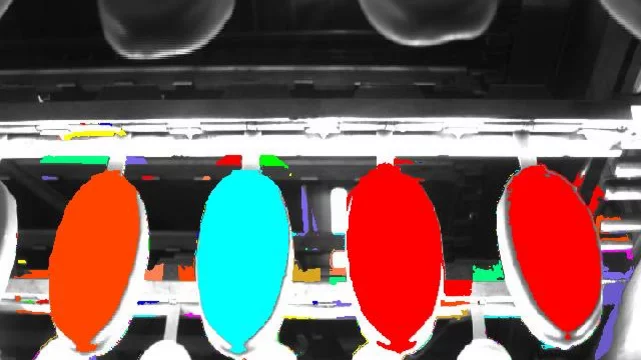
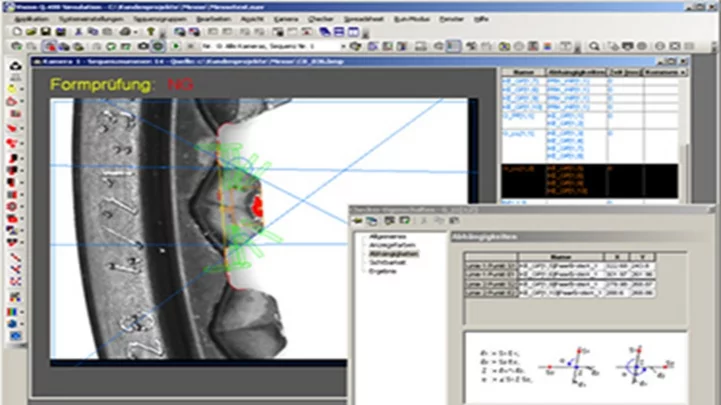
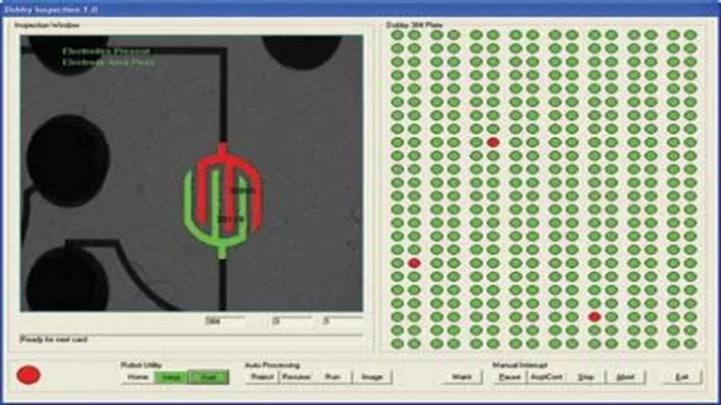
EligoPart 控制器使用 RobotVisionCenter 软件,在组件特定的参数下控制相应相机的图像采集。对采集到的图像执行使用机器视觉软件 MVTec HALCON 开发的组件检测。RobotVisionCenter 软件处理结果后,将拾取位置通过 TCP 发送回 SCARA 机器人,这样机器人就可以直接接近并拾取零件。在连接工作站中,将锚点包装逐个连接到绝缘盘上的几个存放位置In a production cell at the customer Festool, star-shaped insulators, so-called end stars, are picked up by a SCARA robot and attached to armature packs. The end stars are placed between the armature packs, which later form the rotating core of an electric motor.
“HALCON 工具箱中包含的各种模块可以帮助我们解决所面临的各种挑战。”(Roland Loy,Attentra 总经理如是说)
感谢 Attentra 提供文字和图片。
实际应用


![[Translate to Chinese:] Warehouse where cheese wheels age during the ripening process](https://www.mvtec.com/fileadmin/_processed_/1/d/csm_success_story_mvtec_eberle_2_673d7c329f.webp "[Translate to Chinese:] Cheese Warehouse with Stored Cheese Wheels")