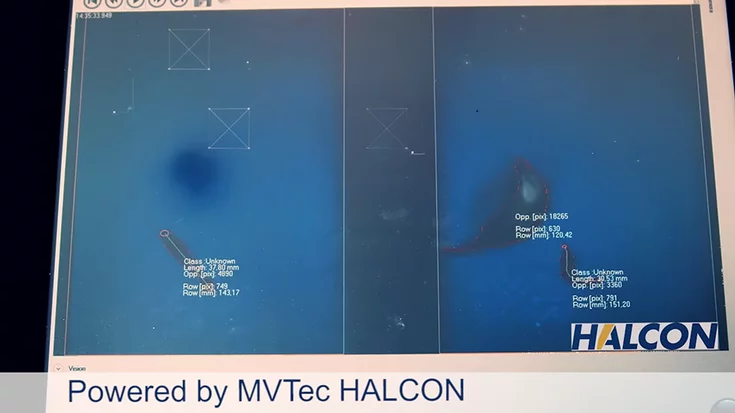
Anwendungsbeispiel, HALCON
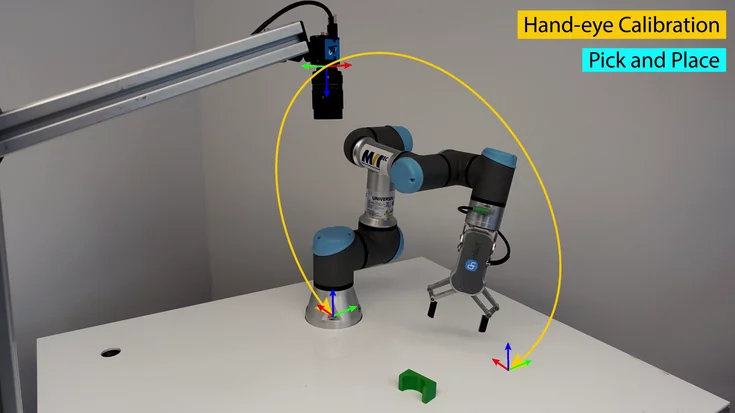
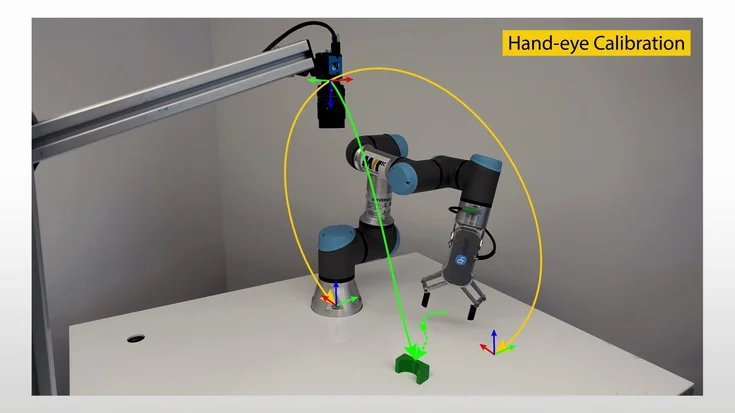
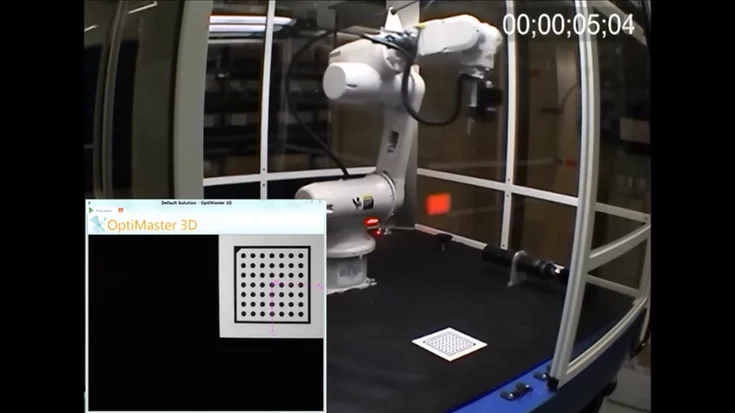
Roboter greifen Automobil–Bauteile aus Kisten ohne jegliche Vorsortierung, wobei unterschiedliche objektabhängige Greifwerkzeuge genutzt werden. Lichtschnittverfahren (der Sensor wird auch vom Roboter bewegt) und HALCON 3D–Vision–Algorithmen werden eingesetzt. Nachdem ein Teil gegriffen wurde, wird es anschließend geordnet abgesetzt.

Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Datenschutzerklärung.
Video aktivieren









































![[Translate to German:] image d3 vrmagic intelligent camera with halcon embedded](https://www.mvtec.com/fileadmin/_processed_/b/3/csm_vrmagic_d3_halcon_embedded_cd08983534.webp "[Translate to German:] image d3 vrmagic intelligent camera with halcon embedded")

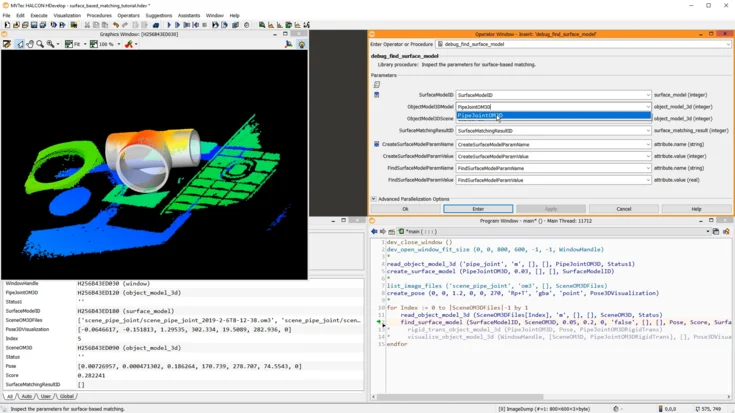
![[Translate to German:] pick and place surface based matching](https://www.mvtec.com/fileadmin/_processed_/7/c/csm_2013-03-27-pick-and-place-halcon-surface-based-matching_2e280b495c.webp "[Translate to German:] pick and place surface based matching")