Step-by-Step-Tutorial, HALCON
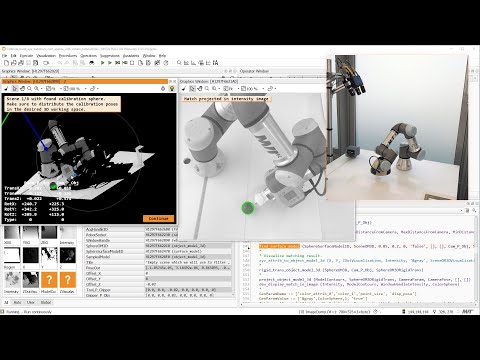
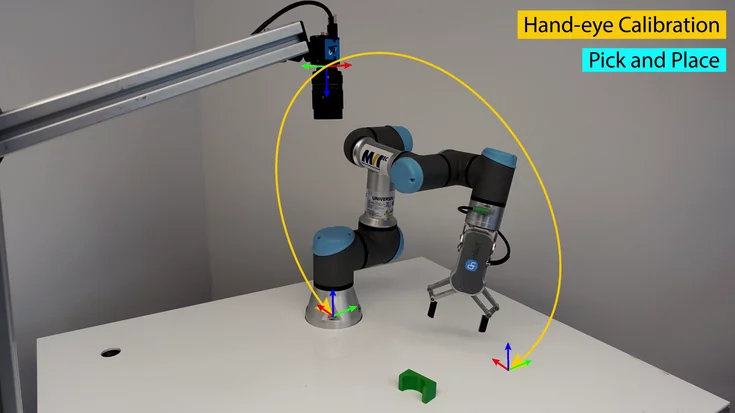
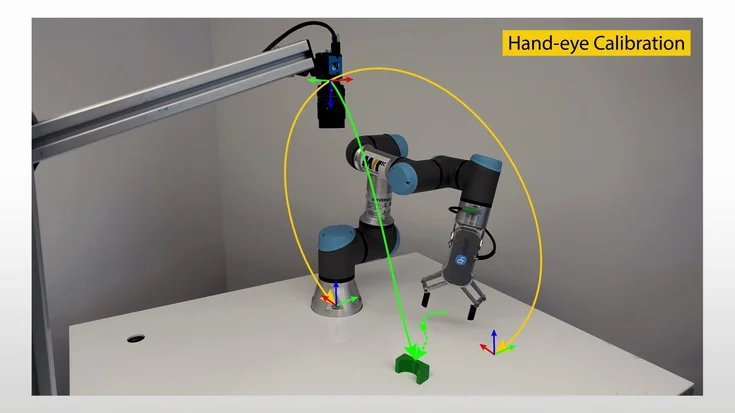
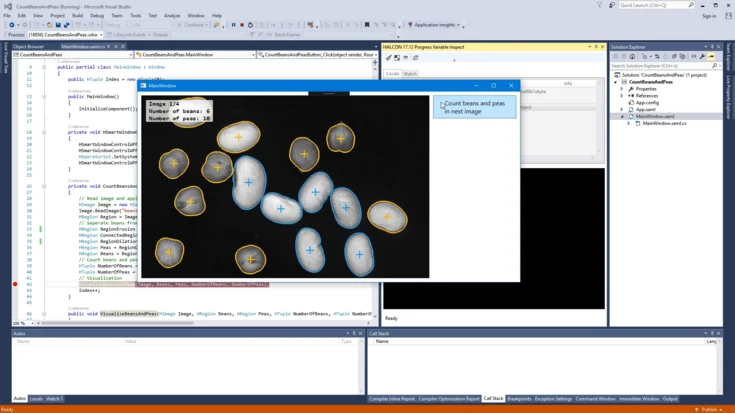
Diese Hand-Augen-Kalibrierung ist notwendig, um Objekte, die von einem stationären 3D-Sensor beobachtet werden, mit einem Roboter aufzunehmen und zu platzieren. Es gibt mehrere Möglichkeiten, eine Hand-Augen-Kalibrierung mit HALCON durchzuführen - in diesem Video hält der Roboter einen Tischtennisball mit seinem Greifer, während der 3D-Sensor Bilddaten aufnimmt. Mit den entsprechenden Posen können wir die Transformation vom Kamerakoordinatensystem in das Koordinatensystem des Roboters kalibrieren.
Wir zeigen verschiedene Ansätze, um die Kalibrierung zu überprüfen und dann ein Objekt mit Hilfe des Kalibrierungsergebnisses auszuwählen und zu platzieren.
Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Datenschutzerklärung.
Video aktivieren



































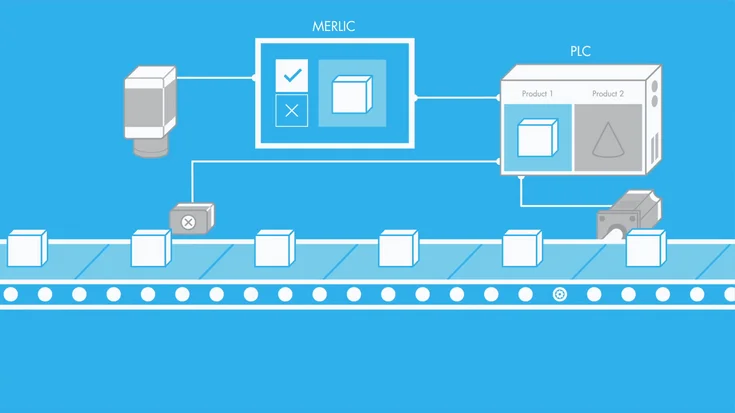






![[Translate to German:] pick and place application examples](https://www.mvtec.com/fileadmin/_processed_/6/4/csm_pick_and_place_application_examples_0807f9f3b5.webp "[Translate to German:] pick and place application examples")
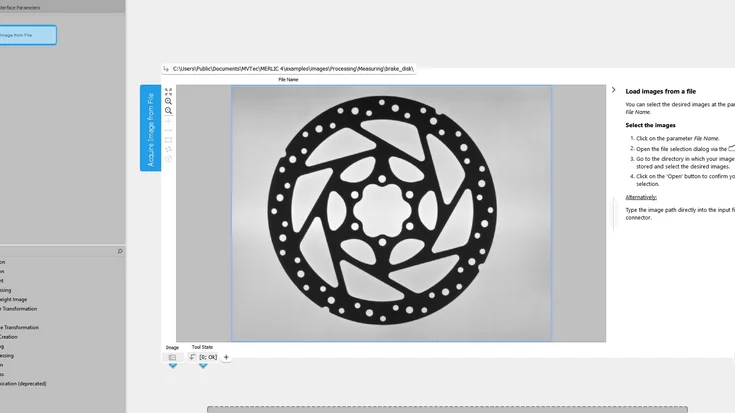
![[Translate to German:] image d3 vrmagic intelligent camera with halcon embedded](https://www.mvtec.com/fileadmin/_processed_/b/3/csm_vrmagic_d3_halcon_embedded_cd08983534.webp "[Translate to German:] image d3 vrmagic intelligent camera with halcon embedded")

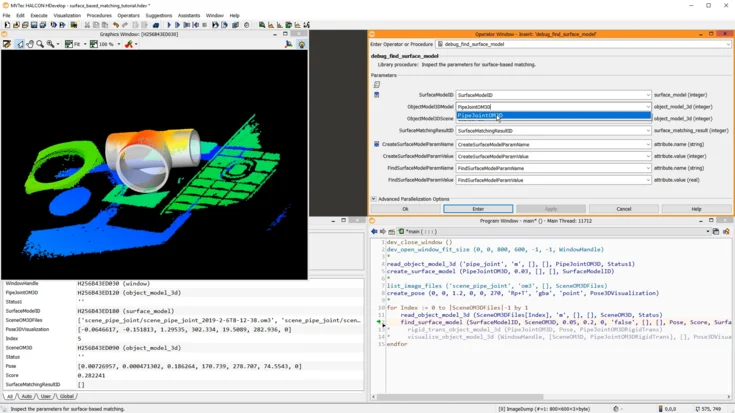
![[Translate to German:] pick and place surface based matching](https://www.mvtec.com/fileadmin/_processed_/7/c/csm_2013-03-27-pick-and-place-halcon-surface-based-matching_2e280b495c.webp "[Translate to German:] pick and place surface based matching")