Application Example, HALCON
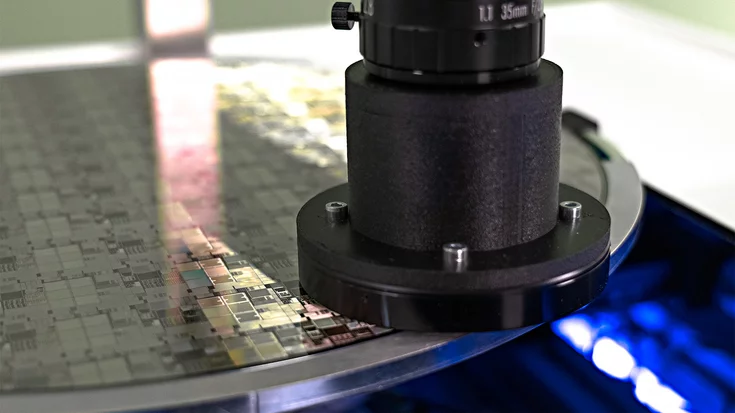
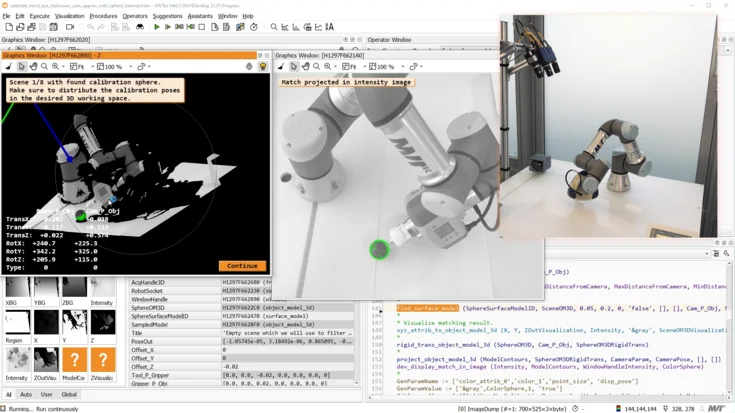
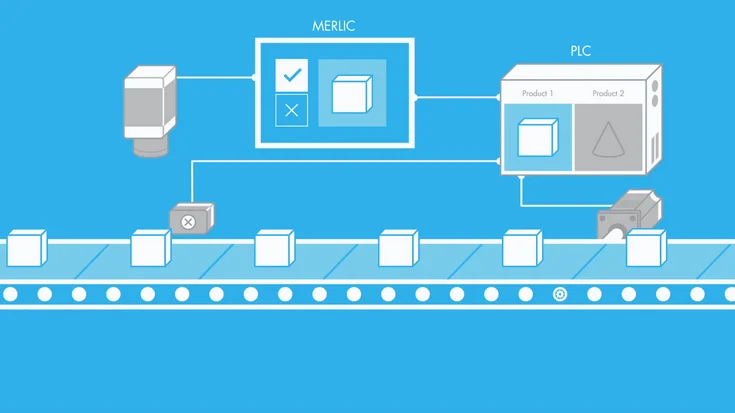
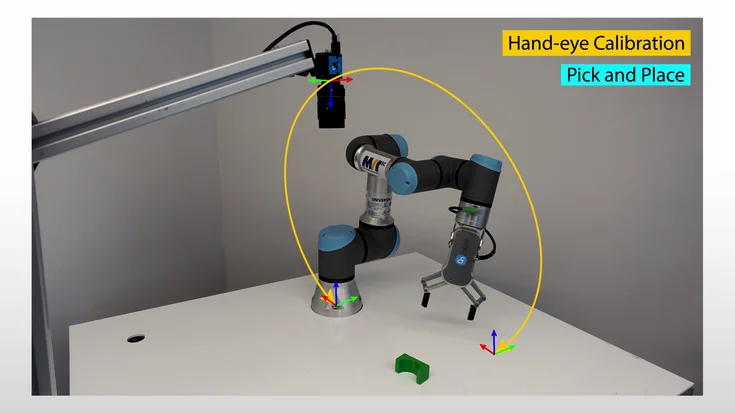
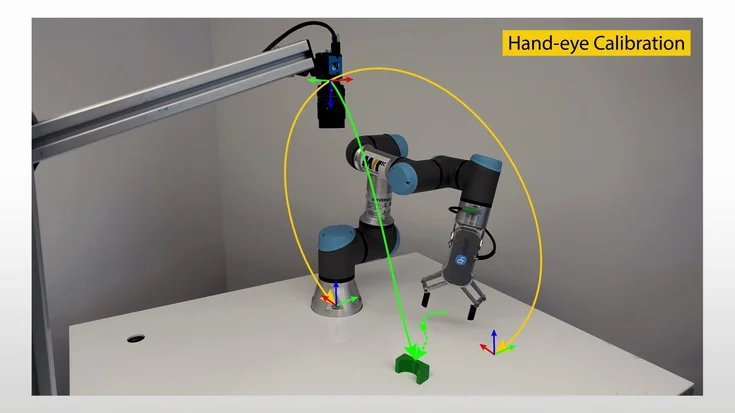
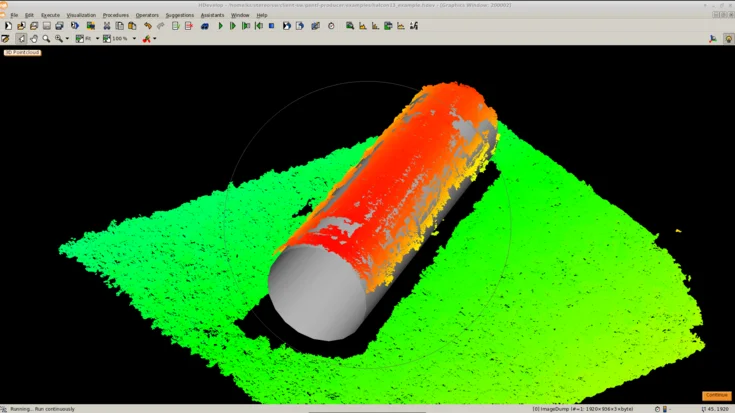
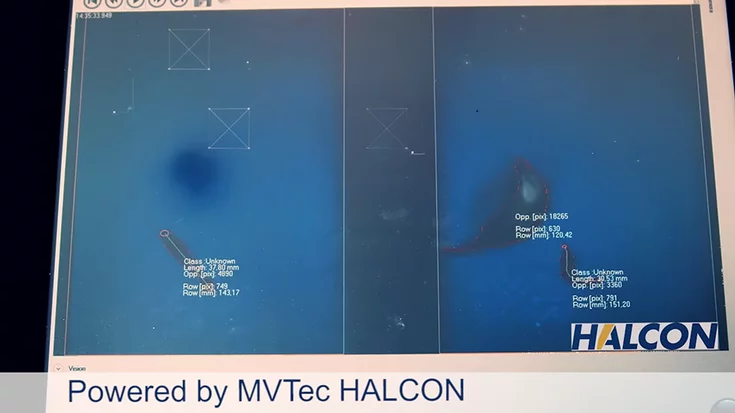
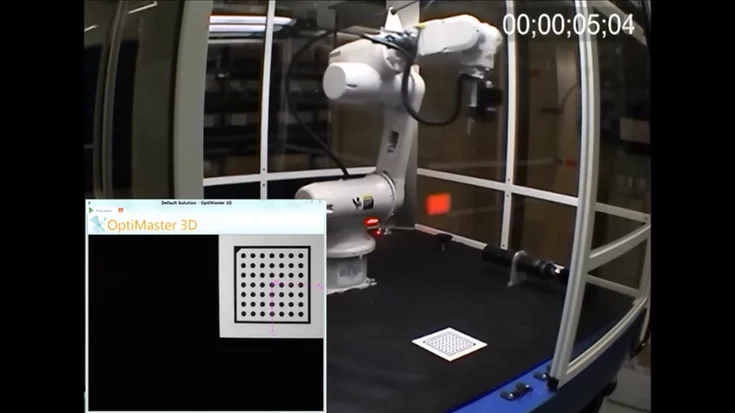
Robots pick automotive parts from boxes in complete state of disorder, using different gripping tools depending on parts. Sheet–of–light method (sensor moved by a robot) and HALCON 3D vision algorithms are used. After grabbing an object, the part is deposited.

Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.
Activate Video