Step-by-step tutorial, HALCON
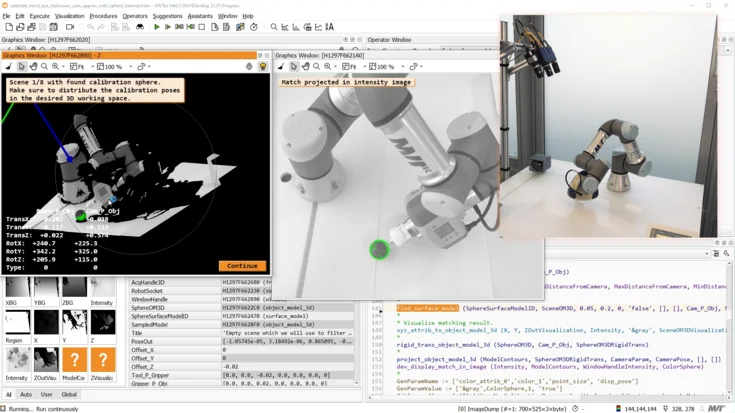
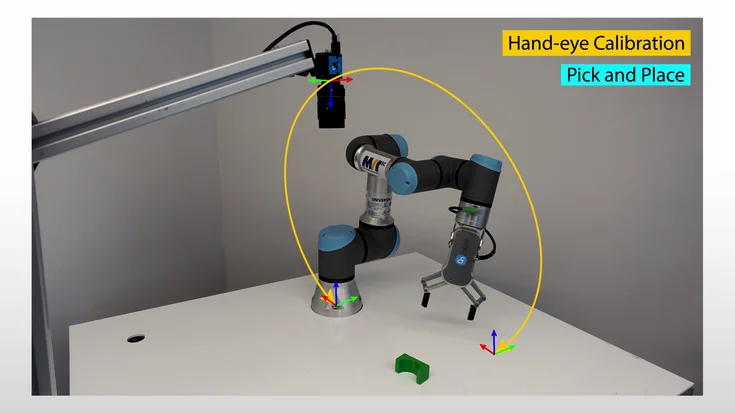
In this tutorial, we use shape-based matching to locate an object on a planar surface. Then, we teach a robot how to approach the object. In a previous tutorial, we performed a hand-eye calibration that we use here.
Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.
Activate Video