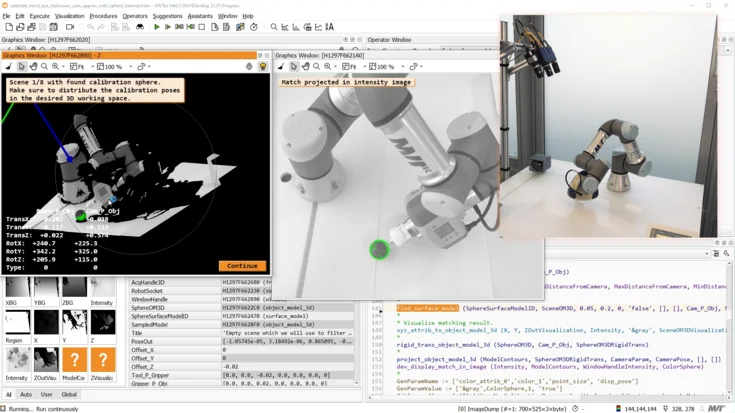
Application Example, HALCON
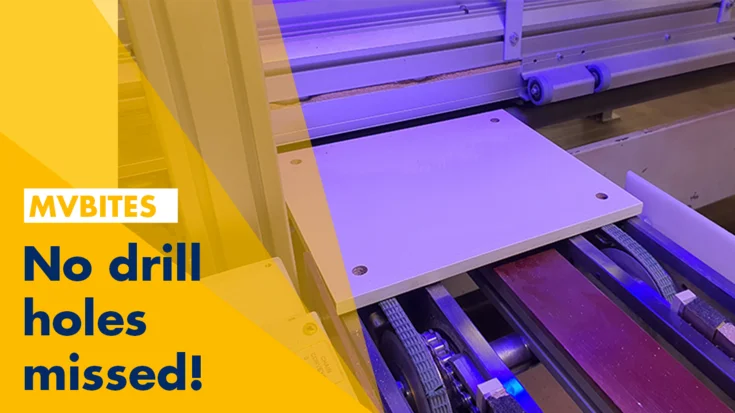
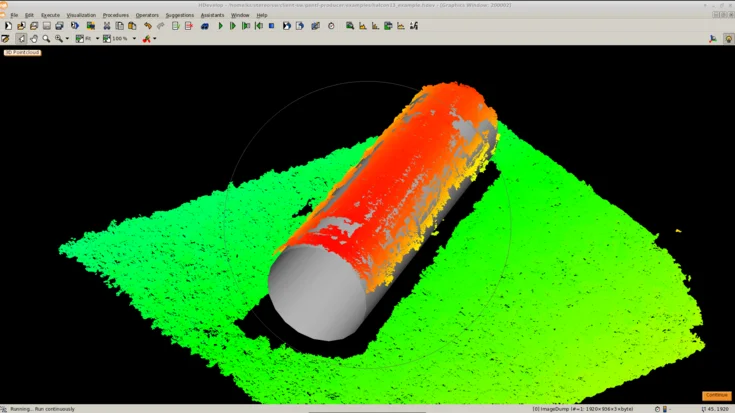
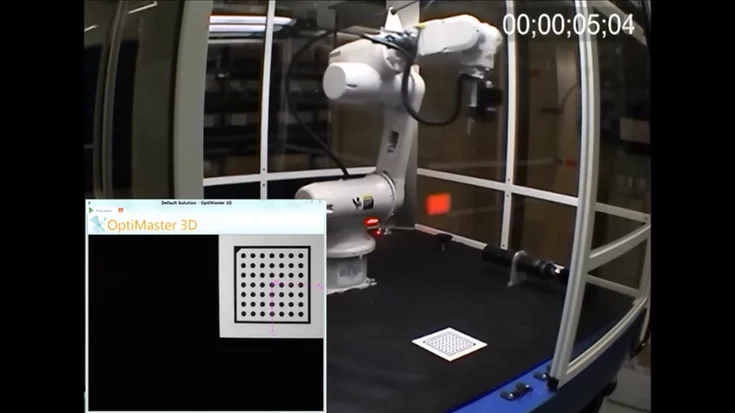
A robot picks heavy automotive parts from boxes in a complete state of disorder, using different gripping points depending on part position and orientation. Sheet–of–light method (sensor moved by a robot) and HALCON’s surface–based 3D matching are used. After pick and place, the parts are localized again on a reference station by 2D matching with one camera. After this, two parts are picked by one robot gripper and placed on a platform for delivering and loading on a welding machine to obtain one final welded part.

Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.
Activate Video