MVTec offers two complementary methods for perspective matching, tailored to object shape and appearance:
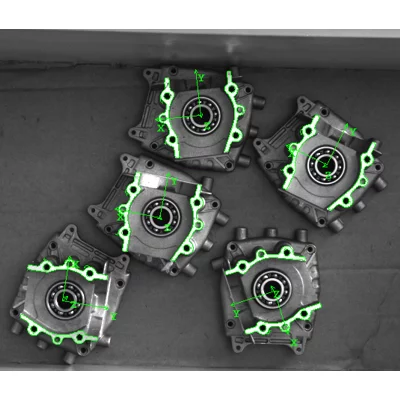
Deformable Matching (Perspective Deformable Matching)
Uses shape-based matching technologies. The software primarily focuses on object edges and can compensate for perspective distortions as well as slight deformations.
Descriptor-Based Matching
Works with "key points" (feature points) in the image. These points are described by their local surroundings and enable robust recognition even with changing viewpoints or lighting conditions.
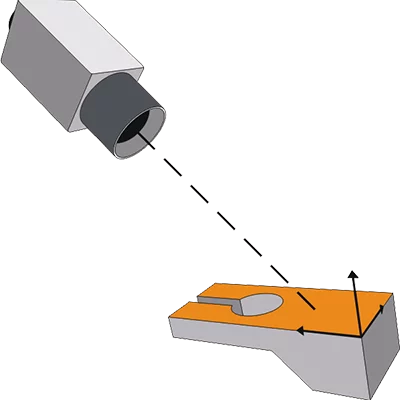
In both cases, objects can be reliably localized with just a single camera, deriving their 3D position. This reduces hardware requirements, simplifies integration, and opens up flexible 3D vision solutions.