Deep 3D Matching combines deep learning algorithms with rule-based methods, enabling exceptionally fast and robust object detection based on 2D images.
Since the method requires minimal parameterization, it is ideal for industrial scenarios, even under challenging conditions such as varying backgrounds, different materials, or partial occlusions.
Bin picking in metal processing and intralogistics.
Robot-based quality inspection in the automotive industry.
Object detection with CAD models in highly varied production environments.
Flexible robot guidance through camera-based position detection.
Training is based on synthetically generated image data (synthetic data), automatically created from existing CAD models. This saves time and costs, as manual labeling is not required.
MVTec software offers both methods, that complement each other and are optimized for different scenarios:
Shape-Based 3D Matching
Uses multiple 2D views of a known object represented by a CAD model. The 3D position is determined based on the object's shape.
Surface-Based 3D Matching
Combines point clouds with range images and reliably detects objects – even on smooth or featureless surfaces.
Both methods allow fine adjustment of the object’s position and are frequently used in quality inspection, robotics, and automated assembly processes.

Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.
Activate Video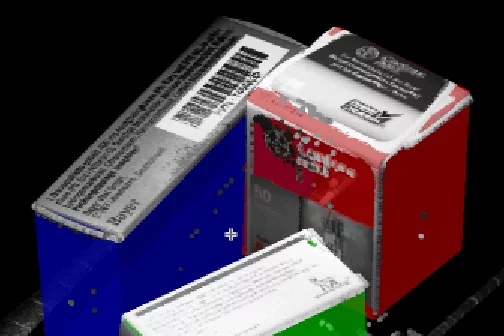
The Generic Box Finder detects boxes of varying sizes within a defined space – without the need for prior model training.
This technology is particularly suitable for logistics and pharmaceutical applications where packages of variable sizes are processed.
Other use cases include measuring geometric properties or locating defects on complex 3D objects after 3D alignment.
3D matching enables precise localization of objects in space. The position and orientation (6D pose) are calculated accurately.
This data can be directly used in robotics applications, such as controlling a robotic gripper or for automated quality inspection.

Please note: Once you watch the video, data will be transmitted to Youtube/Google. For more information, see Google Privacy.
Activate Video